製品情報



- 製品概要
製品概要
BUNKER MINI 2.0はAGILEXの最小のクローラ移動ロボット
シャーシ開発プラットフォームです
業界をリードするIP67の高い保護レベルを備えており、砂、塵、水の侵入を効果的に防ぐことができます。 BUNKERシリーズのオフロード性能を継承し、小さなボディに強力なオフロード登坂能力を持ち、各種試験機材の持ち運びも容易に行えます。 BUNKER MINI 2.0は、屋内外の狭いスペースでオフロードモビリティを実現できる開発プラットフォームを業界の開発者に真に提供し、水路の測量と地図作成、鉱山探査、パイプライン検出、保安検査、特殊写真撮影、特殊撮影、特殊輸送などのロボット用途の急速な拡大に貢献します。
業界をリードする IP67 保護、登山や水遊びを恐れない
BUNKER MINI 2.0は、密閉型ボディ構造、高保護コンポーネント、通信インターフェースの設計により、IP67に達する保護レベルにより、砂、塵、水の侵入を効果的に防ぎ、泥、湿気、水たまり、登山などの過酷な作業環境にも適応できます。

小さなボディ、大きな積載能力
BUNKER MINI 2.0は、モジュール式の合理化された構造設計、コンパクトなボディ、小型サイズ(660*584*281MM)を備えており、直線走行時の最大積載荷重は25KGまで対応可能です。さまざまな試験装置を運びまたはロボットアームを使いもの掴み運搬にも適応しています。

複雑な地形と狭いスペース要件を考慮
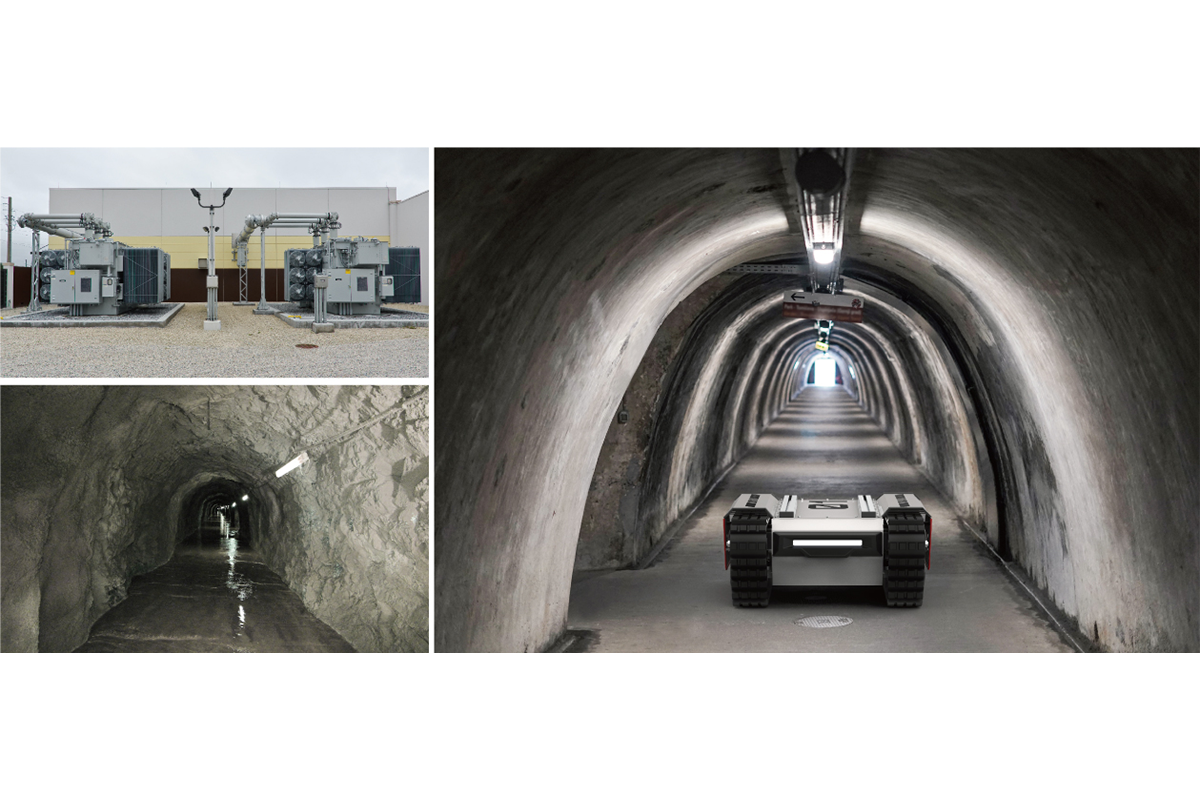
コンパクトなボディの優れた障害物登攀および登攀運動エネルギーと、その場でのスピンの柔軟性を組み合わせた BUNKER MINI 2.0は、水路、鉱山、パイプライン、ボックスカルバート、電気などの複雑な地形の組み合わせを伴う狭いスペースのシナリオの使用を大幅に拡大します。発電所、フィールドコンピュータ室などで、探知、警備、検査、特殊撮影、特殊搬送、測量、地図作成などの特殊作業ロボットの応用を実現します。
マルチロード拡張、迅速な二次開発
BUNKER MINI 2.0は、カスタマイズされた高度な動作モード (リモート運転/自動運転) をサポートし、ユーザーは CAN バス プロトコルを通じてメイン コントロールと通信し、センシング システムに迅速にアクセスし、独立したアプリケーション開発プラットフォームを構築することもできます。AGILEXは、豊富なオープンソース エコシステム、プリインストールされた ROS 制御ノードを提供し、オープンソースの SDK.ROS_PACKAGE とユーザー マニュアルを提供し、1000 を超える業界顧客ソリューションの協力と実装の経験と組み合わせることで、開発者により専門的なソリューションを提供できます。

スペック詳細

ELSA型番:ELRAG-BKMH00R / JANコード:4524076150040
| サイズ | シャーシの高さ | クローラー幅 | 質量 |
| 660mm×584mm×281mm | 65.5mm | 100mm | 54.8kg |
| 積載最大荷重 | 移動速度 | 登坂角度 | 最小回転半径 |
| 25kg | 1.0m/秒 | 無負荷30° | 0m、その場でスピン |
| 障害物乗り越え能力 | 動作環境温度 | 外部電源 | ドライブフォーム |
| 115mm | -20℃~60℃ | 24V/15A | 左右独立駆動、 トラックディファレンシャル ステアリング |
| モーターパラメータ | 通信規格 | コードホイールパラメータ | 通信インターフェース |
| 250W*2(ブラシ付きDCモーター) | CAN | 1024ライン磁気エンコーダ | 標準CAN |
| 防水規格 | バッテリー | 充電器 | 充電時間 |
| IP67 | 24V30AH カープバッテリー | AC200V独立充電器 | 3-4時間 |