- TOP
- 製品情報
- モーター/アクチュエータ
- DEEPRobotics
- DEEPRobotics
Jシリーズ
製品情報
DEEPRobotics
Jシリーズ
その「知能」に、自在な「身体」を。
実体化されたAI(Embodied AI)の基盤となる
高機能関節モジュール。





- 製品概要
製品概要

「フィジカルAI」の可能性を解き放つ。
研究開発から産業実装まで、次世代ロボティクスを加速させる
高性能関節モジュール
DEEPRoboticsが提供するJシリーズの関節モジュールは
ヒューマノイドや四足歩行ロボットなどの「脚式ロボット」開発に特化した、
高出力・高精度アクチュエータユニットです。
軽量で俊敏な動作を実現し、教育・研究開発に最適な「J60」。
そして、産業用ロボット「X30」にも採用され、圧倒的なトルクとIP67の耐環境性を備えた
フラッグシップモデル「J80 / J100」。
これらすべてのモデルに、減速機、モータ、ドライバ、エンコーダを統合したオールインワン設計を採用。
複雑なハードウェア構築の工数を大幅に削減し、開発者がアルゴリズムやアプリケーション開発に専念できる
環境を提供します。
J60
知能体(Intelligent Agents)に、力強い動力を。
次世代の人型・多脚ロボット開発を支えるコア・コンポーネント
DEEPRoboticsの「J60」シリーズは、ヒューマノイドロボット(人型ロボット)の基盤となる高性能関節モジュールです。
ロボットに優れた機動力と柔軟性をもたらすよう設計されており、
四足歩行ロボットをはじめとする様々な形態のロボットに最適化されています。
「フィジカルAI(身体性を持つ人工知能)」や「AI×ロボティクス」の具現化において
極めて重要な役割を果たすだけでなく、先端科学研究、教育、ロボットコンテスト、そして高度なDIYプロジェクトまで、
プロフェッショナルの幅広いニーズに応えます。
-

卓越したパフォーマンス
同クラス最高レベルのトルク密度
J60は、同重量クラスにおいて極めて優れたトルク性能を誇ります。
最大トルク重量比は56.48Nm/kg(J60-10モデル)に達し、ロボットのダイナミックな動きを支える強力な動力源となります。 -

高い信頼性と実証された耐久性
過酷な制御アルゴリズムにも対応する実戦仕様
四足歩行ロボットのモデル予測制御(MPC)や強化学習による制御など、高度な計算負荷のかかる用途に最適です。同社の量産型四足歩行ロボット「Lite3」にも採用されており、製品としての完成度と耐久性は既に実証されています。 -

オールインワンの統合設計
開発スピードを加速させるコンパクトな構造
J60は、減速機、フレームレス・トルクモータ、サーボドライバ、およびアブソリュート・エンコーダを単一のモジュール内に統合。極めてコンパクトな構造により、ロボットへの組み込み設計が容易になり、開発工数の削減に貢献します。 -

状態検知および保護機能
安全な運用を支えるインテリジェントな監視システム
内部に温度検知および保護システムを搭載。入力電流と電圧をリアルタイムで継続的に監視し、過負荷や異常過熱からシステムを保護することで、長期間の安全な運用を保証します。 -

デバッグおよび開発キット
マルチプラットフォーム対応の充実した開発環境
通信インターフェースとしてシリアルポートとCANの両方を装備。WindowsおよびLinuxに対応した、直感的な視覚的デバッグソフトウェアを提供します。また、Linuxシステム向けに最適化されたCAN通信プロトコルとC言語ベースのSDK(サンプルルーチンを含む)を同梱しており、高度なシステム統合をスムーズに実現します。
J60 スペック表
| 項目 | J60-6 | J60-10 |
|---|---|---|
| 外形寸法 | ||
| サイズ | 76.5mm × 63mm | 76.5mm × 72.5mm |
| 重量 | 480g | 540g |
| 電気特性 | ||
| 動作電圧範囲 | DC 18V~36V | DC 18V~36V |
| 標準動作電圧 | DC 24V | DC 24V |
| 最大相電流 | 30A | 30A |
| トルク | ||
| ピークトルク | 19.94Nm | 30.50Nm |
| 最高速度 | 24.18rad/s | 15.49rad/s |
| トルク定数 | 0.8982Nm/A | 1.3473Nm/A |
| 最大トルク重量比 | 41.54Nm/kg | 56.48Nm/kg |
| エンコーダ | ||
| エンコーダ形式 | アブソリュートエンコーダ | アブソリュートエンコーダ |
| エンコーダ解像度 | 14bit | 14bit |
| 通信 | ||
| 通信方式 | CAN | CAN |
| 通信ボーレート | 1Mbps | 1Mbps |
| 通信制御周波数 | 1kHz | 1kHz |
* すべてのパラメータは試験環境下でのデータであり、実際の使用環境では異なる場合があります。
* 本製品は実機仕様が優先されます。DEEPRoboticsは最終的な解釈権を留保します。
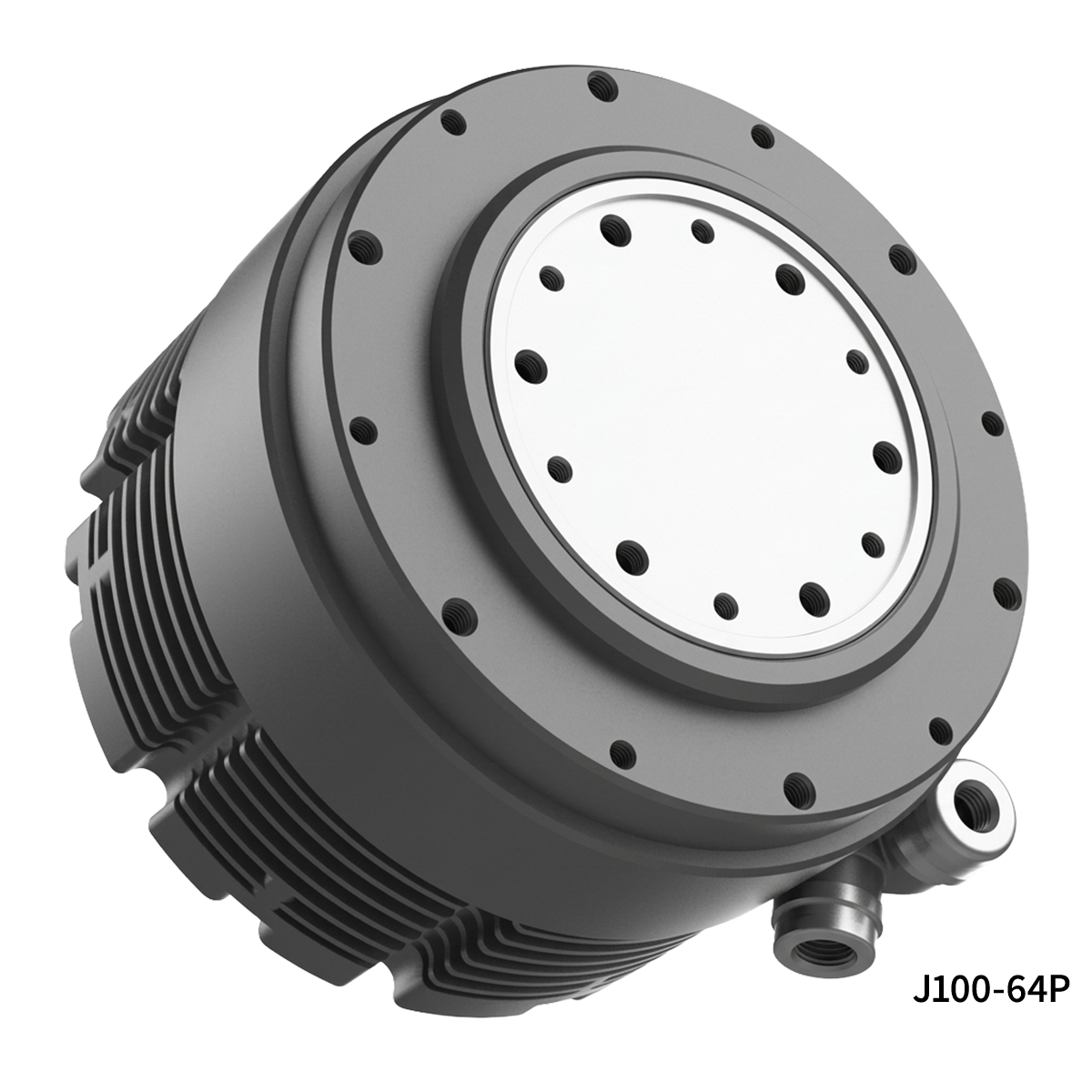
J80 / J100
超高トルク・究極の性能・高堅牢性を備えた産業用関節モジュール大型ヒューマノイドおよび産業用ロボットの核心的動力源
J80およびJ100シリーズは、圧倒的なトルク性能を誇るハイエンド関節モジュールです。
DEEPRoboticsの産業用四足歩行ロボット「X30」に採用され、その性能は実証済み。
大型ヒューマノイドロボットをはじめとする、次世代の脚式ロボット産業の発展を支えるコア・コンポーネントとして、
究極の動力を提供します。
-

産業用ロボット「X30」と共通の信頼性
過酷な現場で鍛え上げられた実戦仕様
J80/J100は、産業グレードの四足歩行ロボット「X30」に標準搭載されている関節ユニットです。多種多様な複雑な環境や、過酷な動作条件下での大規模な実用運用を通じて、その高い信頼性と耐久性が実証されています。 -

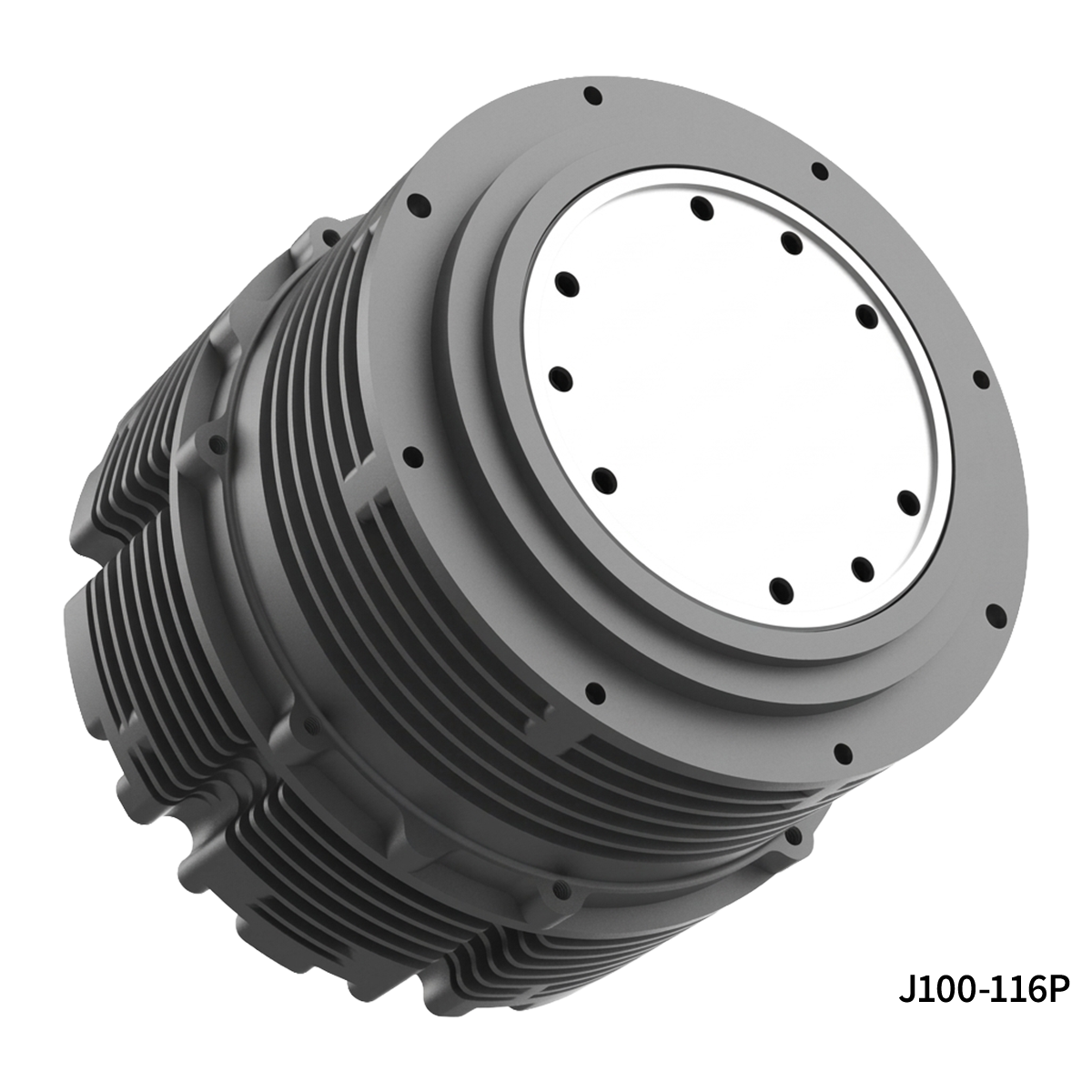
限界に挑むパフォーマンス
大型ロボットを軽々と駆動するパワー
J100-116Pモデルでは、最大出力トルクが315Nm、最大トルク密度は107.5Nm/kgに達します。この強力な出力により、大型の脚式ロボットが要求する極めて高い動力ニーズを余裕を持って充足させることが可能です。 -

厳格な産業製品基準
産業用フラッグシップモデルの品質をそのままに
業界をリードする「X30」の基幹部品として、J80/J100は厳格な産業規格に基づいて設計・製造されています。優れた安定性と汎用性を備え、ミッションクリティカルな用途においても安定したパフォーマンスを発揮します。 -

IP67規格の防塵・防水性能
全天候型の屋外運用に対応
IP67等級の保護性能を備えており、雨天時や粉塵の舞う屋外環境など、あらゆるコンディション下での運用が可能です。 -

高精度なモーションコントロール
バッテリーレス・多回転絶対値エンコーダ搭載
高精度かつ信頼性に優れた「バッテリーレス多回転アブソリュートエンコーダ」を採用。関節全体にわたる緻密なチューニングにより、極めて正確で滑らかな制御パフォーマンスを実現します。 -

高速通信ソリューション
最大30軸の同期を可能にするEtherCAT対応
高速なEtherCAT通信スキームを採用しており、最大30軸の関節をリアルタイムで同期制御可能です。多関節ロボットが求める高度なパフォーマンス要件を完全に満たします。 -
主要ドライバとの互換性と
「駆動・制御分離」設計柔軟なシステム統合と最適な熱管理
市場の主要なドライバと高い互換性を持ち、ユーザーのニーズに合わせた統合開発が可能です。また、駆動部と制御部を分離した「駆動・制御分離設計」を採用。これにより、関節の組み込み自由度が向上し、効率的な放熱設計が可能となります。
J80 / J100 スペック表
| 項目 | J80-27P | J100-64P | J100-116P |
|---|---|---|---|
| 外形寸法 | |||
| サイズ | 105mm × 85.5mm | 126mm × 88mm | 126mm × 105mm |
| 重量 | 1.48kg | 2.72kg | 2.93kg |
| 電気特性 | |||
| 動作電圧範囲 | DC 28~95V | DC 28~95V | DC 28~95V |
| 定格電圧 | DC 72V | DC 72V | DC 72V |
| 最大電流(rms) | 55A | 91A | 91A |
| 定格電流(rms) | 14A | 29.5A | 29.5A |
| パフォーマンス | |||
| ピークトルク | 84Nm | 180Nm | 315Nm |
| 定格トルク | 28Nm | 65Nm | 115.5Nm |
| トルク定数 | 2Nm/Arms | 2.2Nm/Arms | 3.9Nm/Arms |
| 最大トルク重量比 | 56.8Nm/kg | 66.2Nm/kg | 107.5Nm/kg |
| 最大回転速度 | 17rad/s | 18rad/s | 19.4rad/s |
| エンコーダ | |||
| エンコーダ形式 | アブソリュート・マルチターン | アブソリュート・マルチターン | アブソリュート・マルチターン |
| エンコーダ通信仕様 | シングルターン 17bit マルチターン 16bit |
シングルターン 17bit マルチターン 16bit |
シングルターン 17bit マルチターン 16bit |
| ジョイント特性 | |||
| モータ巻線抵抗 | 14 | 14 | 14 |
| モータ線間インダクタンス | 1.08Ω | 0.34Ω | 0.078Ω |
| エンコーダ(磁気) | 1.18mH | 0.61mH | 0.11mH |
* すべてのパラメータは試験環境下でのデータであり、実際の使用環境では異なる場合があります。
* 本製品は実機仕様が優先されます。DEEPRoboticsは最終的な解釈権を留保します。