製品情報



- 製品概要
製品概要
LIMO ROS2 ロボットは Intel NCU i7 プロセッサを使用し、Ubuntu 22.04 上で ROS 2 Humble を実行でき、自律移動ロボットの研究と教育に重要なプラットフォームを提供します。 ROS のアップグレード バージョンである ROS 2 は、安全性、信頼性、コンポーネントのエコロジーなどの多くの側面で大幅な最適化が行われており、現在最も先進的なロボット開発フレームワークです。 LIMO ROS2 は ROS 2 と完全な互換性があり、ユーザーは Navigation2 や MoveIt2 などの最新機能やその他の最先端のテクノロジーを学び、実践することができます。同時に、稼働時間は最大 2.5 時間となり、開発やアプリケーションの継続的な稼働が可能となります。
高度なコンピューティング ユニット
Intel NUC i7 と強力な CPU を搭載しており、マルチセンサー データ フュージョンと SLAM マッピングをより安定して実現できます。

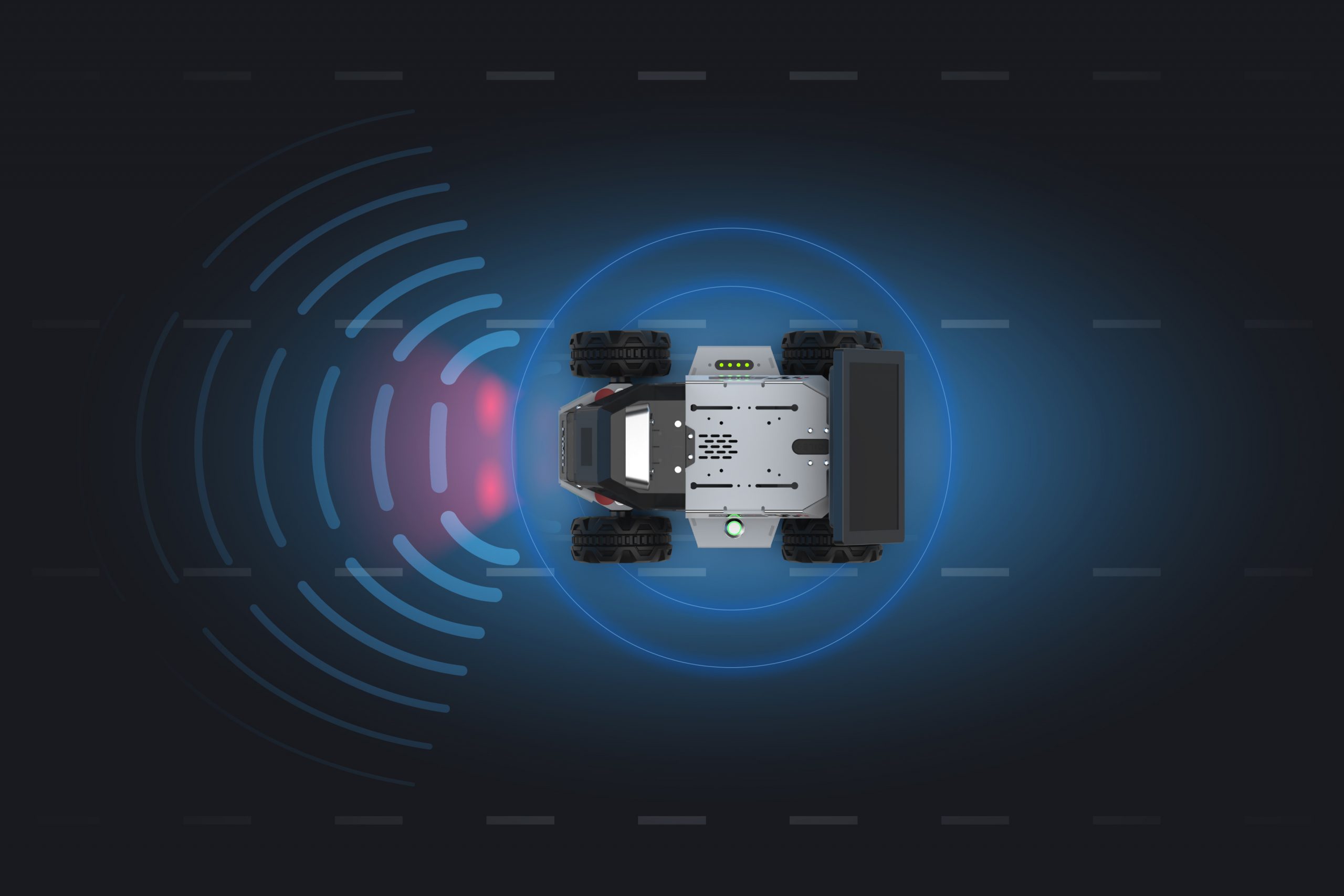
高精度なセンサー
オプションの EAI T-mini Pro ライダーと OBI 大型白色深度カメラは、自律測位、ナビゲーション計画、動的障害物回避のための高精度マップの構築をサポートします。
稼働時間が2倍
バッテリー容量が10000mAhに増加し、パワーと動作の安定性が大幅に向上しました。

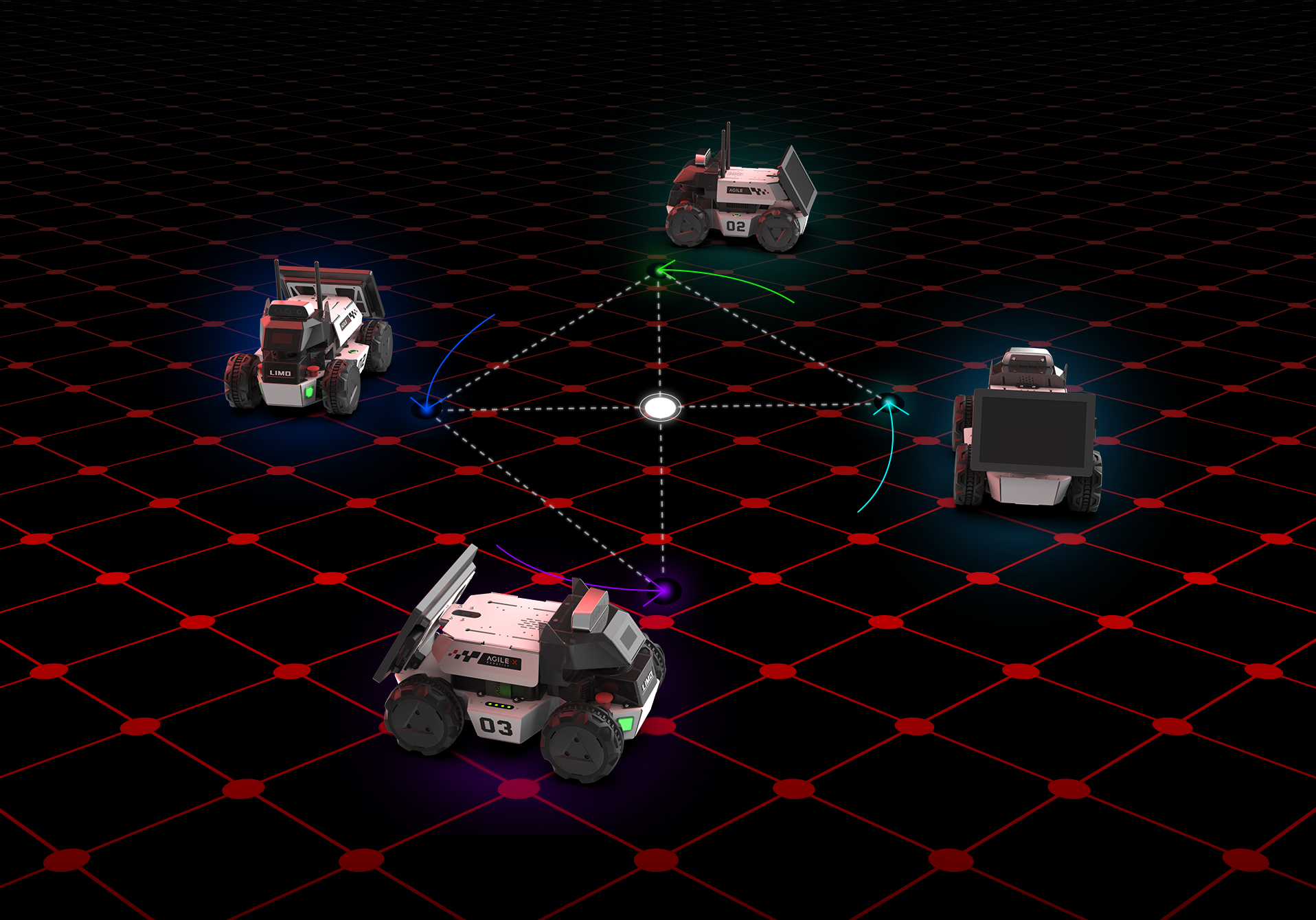
複数マシンのコラボレーション
クラスターのコラボレーションとフォーメーションの移動のために複数のロボットをサポートし、協調的なセンシング、意思決定、制御を実現します。
オープンソースをサポート
ROS および Gazebo プラットフォームをサポートし、Python や C++ などの主流のプログラミング言語と互換性があるため、ユーザーはロボット アプリケーションを拡張または開発することができます。

スペック詳細

ELSA型番:ELRAG-LMRH00R / JANコード:4524076150125
| サイズ | 質量 | 積載重量 | 最低地上高 |
| 322*220*251mm | 4.8kg | 4kg | 24mm |
| ステアリング構造 | ディスプレイ | 組み込みPC | 深度カメラ |
| 40N·m | 付属 | Intel NUC | 奥比中光 DaBai |
| レーザーレーダー | バッテリー | 稼働時間 | 待機時間 |
| EAI T-mini Pro | 10Ah 12V | 2.5時間 | 4時間 |
| システム | ROSバージョン | 制御方式 | 制御距離 |
| Ubuntu 22.04 | ROS2 Humble | スマホアプリ、指令制御 | 10m |