製品情報
LIMO
ROS ロボット開発プラットフォーム



- 製品概要
製品概要
LIMO は、4 つの動作モードを統合した世界初の ROS 開発プラットフォームであり、より幅広いシナリオに適応し、ロボットの教育、機能の研究、製品開発に適した学習プラットフォームを提供します。革新的な機械設計により、四輪ディファレンシャル、アッカーマン、クローラー、メカナムホイールの動作モードを素早く切り替えることができ、サポートするプロ仕様のサンドテーブルでマルチシーンのシミュレーション教育とテストを迅速に確立できます。
4 つの動作モードを備えた 1 台の車両に統合されたホイールハブドライブ
LIMO は、4 つの動作モードを統合した世界初の ROS 開発プラットフォームで、ユーザーは 4 輪ディファレンシャル型、4 輪アッカーマン型、クローラ型、メカナムホイール型の 4 つの動作モードを実現できます。

ROS開発サポート
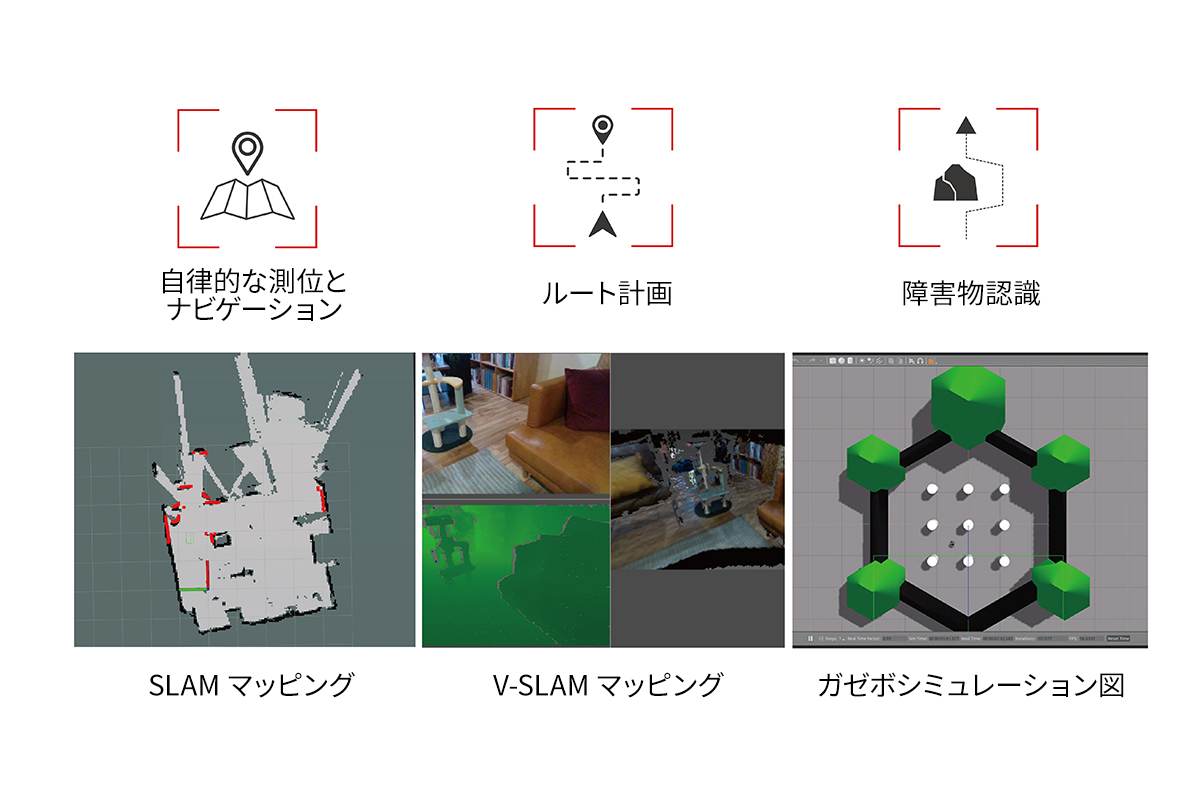
LIMO のソフトウェアは完全にオープンソースであり、ROS1 および ROS2 の開発をサポートしています。ユーザーは強力な Gazebo モデル シミュレーション パッケージを使用して、自分でシミュレーション環境を構築および展開し、対応する走行パスを設定し、マッピング、ナビゲーション、障害物回避、ルート計画などを実装できます。
配置のシミュレーション機能の設定
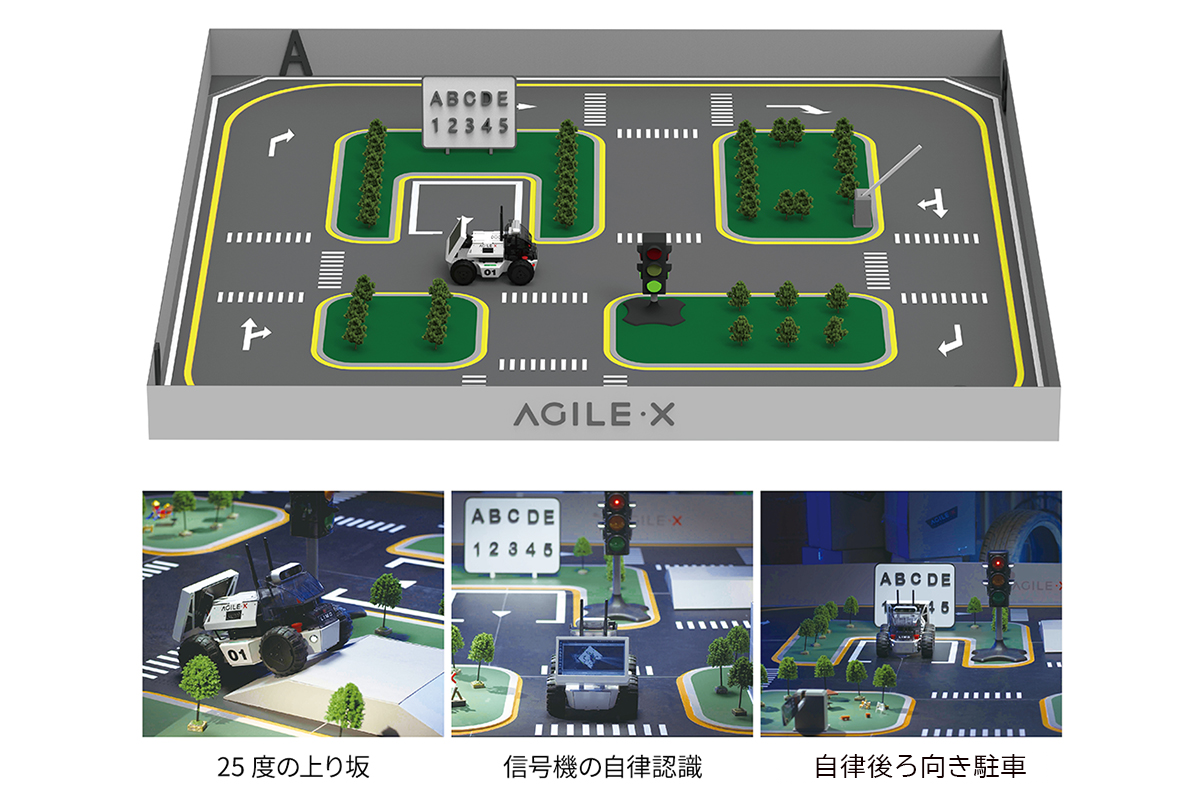
小規模な会場のニーズに適応する、マルチシナリオ シミュレーションの教育とテストの実験プラットフォームを 10 分で確立します。 初心者にも使いやすく、豊富な自動運転機能、SLAM マッピング、自律ナビゲーションと障害物回避、自律後ろ向き駐車と駐車、信号認識、アルファベット文字音声認識を実装するようにプログラムできます。
スペック詳細

ELSA型番:ELRAG-LMOH00R / JANコード:4524076150095
| サイズ | 質量 | 積載重量 | 最低地上高 |
| 322*220*251mm | 4.8kg | 4kg | 24mm |
| ステアリング構造 | ディスプレイ | 組み込みPC | 深度カメラ |
| 40N·m | 付属 | Jeston Nano | 奥比中光 DaBai |
| レーザーレーダー | バッテリー | 稼働時間 | 待機時間 |
| EAI X2L | 5.2Ah 12V | 1時間 | 2時間 |
| システム | ROSバージョン | 制御方式 | 制御距離 |
| Ubuntu 18.04 | ROS1 Melodic | スマホアプリ、指令制御 | 10m |