製品情報
Linkerbot Linker Hand L20
21自由度(16 Active + 5 Passive)が解き放つ、人間と同等の巧みな指先。
複雑な道具の運用も、かつてない機敏さで自在に。





- 製品概要
製品概要

次世代ロボットハンド
Linker Hand シリーズ、日本上陸
21自由度(16 Active + 5 Passive) / 0.5s高速レスポンス。
人間と同等の器用さとデータ収集能力で、エンボディドAIの進化を加速させるフラッグシップモデル。
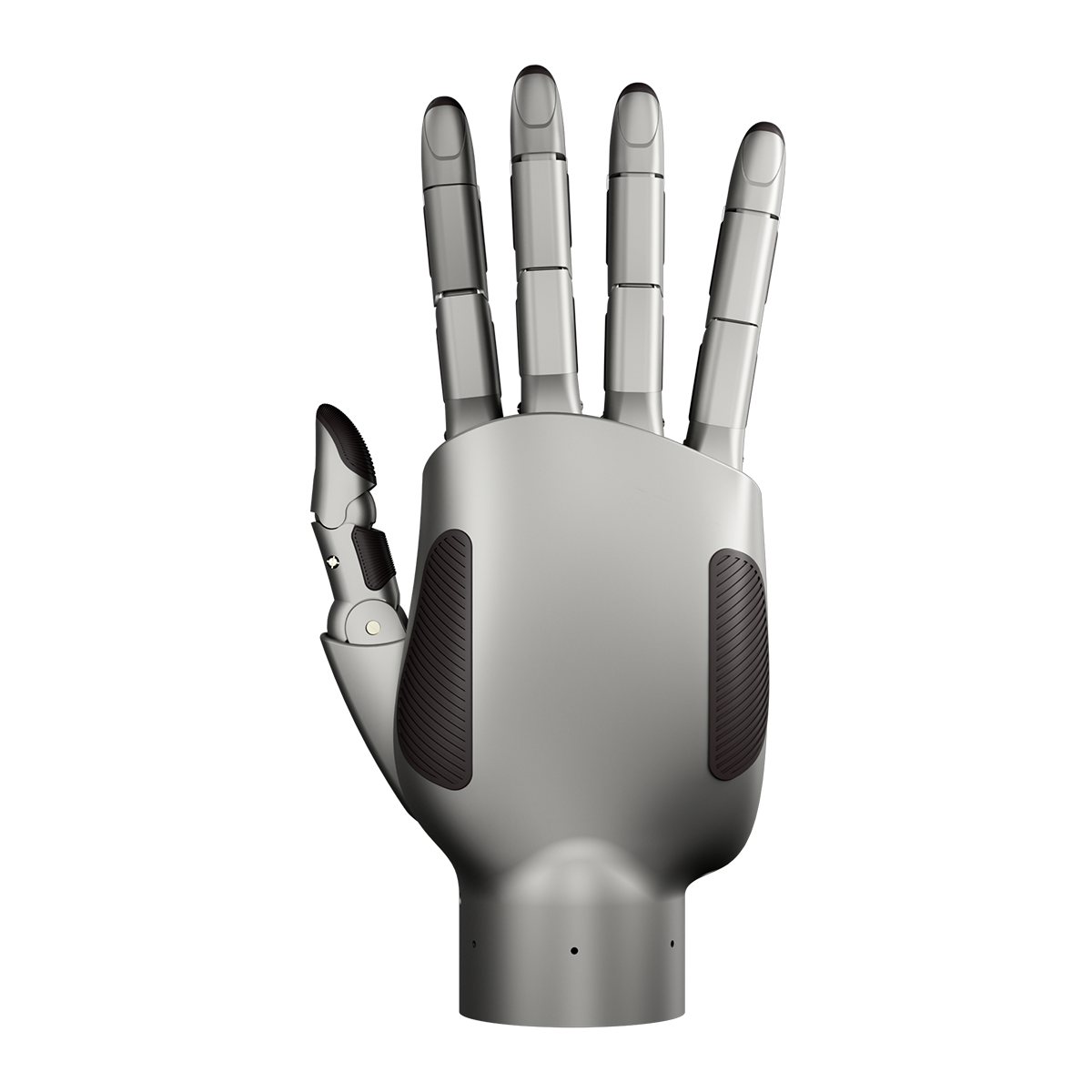
Linker Hand L20(ハイエンド・研究開発向け)
Linker Hand L20は、21の自由度(16 Active + 5 Passive)を実装したハイパフォーマンス・デクスタラスハンドです。ヒトの手の自然な把握動作を高度にシミュレートし、従来のロボットハンドでは困難だった多角的かつ精緻なオペレーションを実現します。駆動系には独自開発のモーターとリンク伝達機構を採用。これにより、極めて高い制御精度とダイナミックな運動性能を両立しました。
主な特長

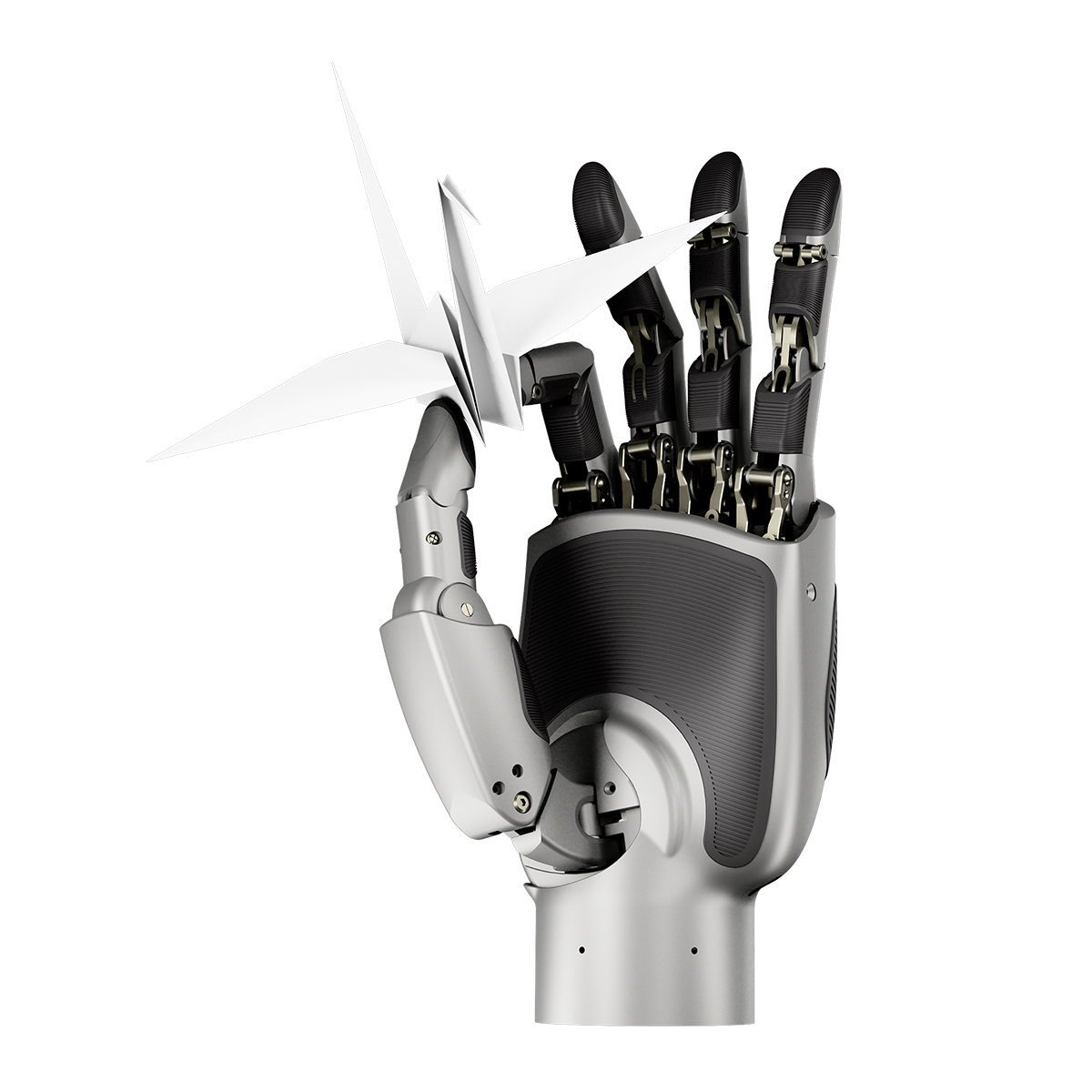
高自由度な関節構造
各指に独立した4つの自由度を実装。
ヒトの手の複雑な動きを忠実に再現し、高度に精緻なオペレーション要求に応えます。

マルチセンシングシステム
カメラやタクタイル・センサ(電子皮膚)等、先進のマルチセンサを統合。全方位的な視覚・触覚情報の取得により、複雑な認識とインタラクションを可能にします。

エッジ・クラウド
統合ソリューション
独自の「端云融合」技術により、クラウド上のスキルライブラリから最適化された動作を迅速にデプロイ。開発工数の削減と容易なカスタマイズを両立します。

高効率データアクイジション
自社開発の高効率データ収集機能により、AI学習のための「データファーム」構築を支援します。

優れた堅牢性と耐環境性
高い耐衝撃性を備えた設計で、エンボディドAIにおける過酷な反復トレーニングや、多様な実験シナリオ下でも安定したパフォーマンスを維持します。
プロダクト・エコシステム
- 対応ロボットアーム
- UR、Franka、xArm、RealMan、AgileX
- 対応データ収集方式
-
テレオペレーション・グローブ(外骨格型 / 液体金属センサー内蔵)、
ビジョンベース(視覚認識)、VR(Meta Quest 3) - 対応シミュレーター
- Pybullet、Isaac、MuJoCo
- インターフェース
- CAN、RS485
- 活用事例
- ROS1、ROS2、Python、C++
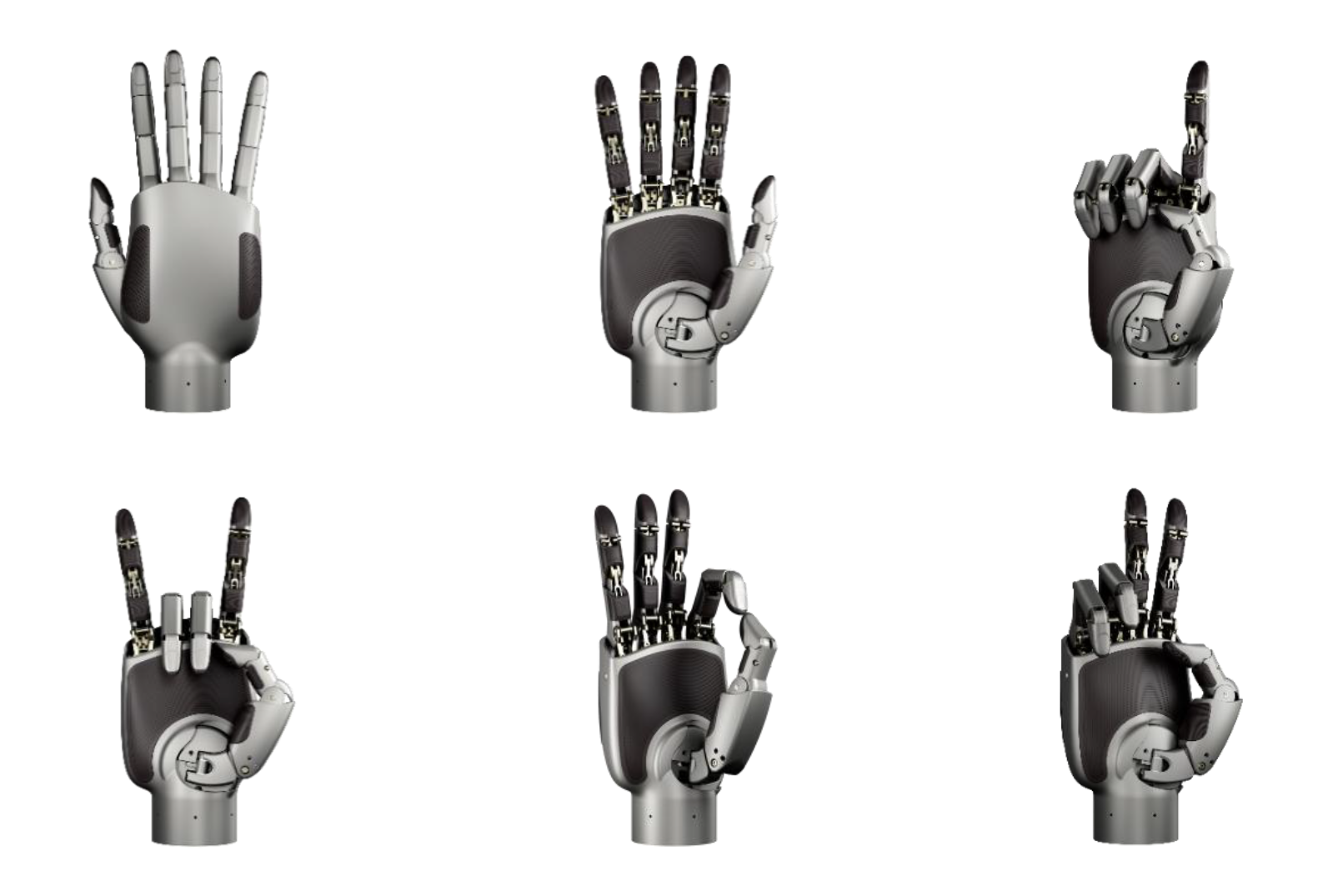
活用事例
21自由度(16 Active + 5 Passive)の高精度関節と高速レスポンスが、人間と同等の複雑かつ機敏な指先操作を実現します。

生活空間における複雑な形状への適応

指先による高精度な
ピンポイント・インタラクション

複数関節の連動による
高度な道具の運用

人間と同等の器用さを必要とする
微細作業
デモンストレーション動画
Titanium:
ネジ締め作業
Titanium:
ロボットアームの組み立て
21自由度(16 Active + 5 Passive):
巧みな動きのダンスパフォーマンス
21自由度(16 Active + 5 Passive):
ハンド・デモンストレーション
21自由度(16 Active + 5 Passive):
巧みな指先によるコネクタの挿入
21自由度(16 Active + 5 Passive):
圧倒的に滑らかなハンド・アクション
製品スペック
| 自由度 (DoF) | 21 |
|---|---|
| 関節数 | 16 Active + 5 Passive |
| 伝達方式 | リンク駆動 (Linkage Drive) |
| 駆動方式 | 自社開発関節モジュール |
| 制御インターフェース | CAN |
| 重量 | 1216g |
| 最大可搬重量 (Max Load) | 20kg |
| 動作電圧 | 24V – 48V |
| 待機電流 | 0.3A @24V |
| 無負荷時平均電流 | 0.374A @24V |
| 最大電流 | 1.82A @24V |
| 繰返し位置決め精度 | ±0.20mm |
| 親指指先最大力 | 14N |
| 四指指先最大力 | 15N |
| 親指側方回転範囲 | 1.39 rad ( 79.7° ) |
| 四指屈曲角度 | 1.22 rad ( 69.7° ) |
| 親指側振速度 | 2.99 rad/s ( 171.42°/s ) |
| 四指屈曲速度 | 3.21 rad/s ( 184.09°/s ) |
| 親指屈曲速度 | 0.94 rad/s ( 54.12°/s ) |