製品情報
Linkerbot Linker Hand L20 Lite
器用さと、導入のしやすさを、その手に。
インテリジェント・ハンドの新基準。


- 製品概要
製品概要

次世代ロボットハンド
Linker Hand シリーズ、日本上陸
10 Active / リンク機構駆動。
自社開発モーターと高度なリンク機構により、圧倒的な動作安定性と精密な制御を両立。
L20の技術を継承しつつ、コストパフォーマンスを最適化した実戦型ミドルレンジモデル。
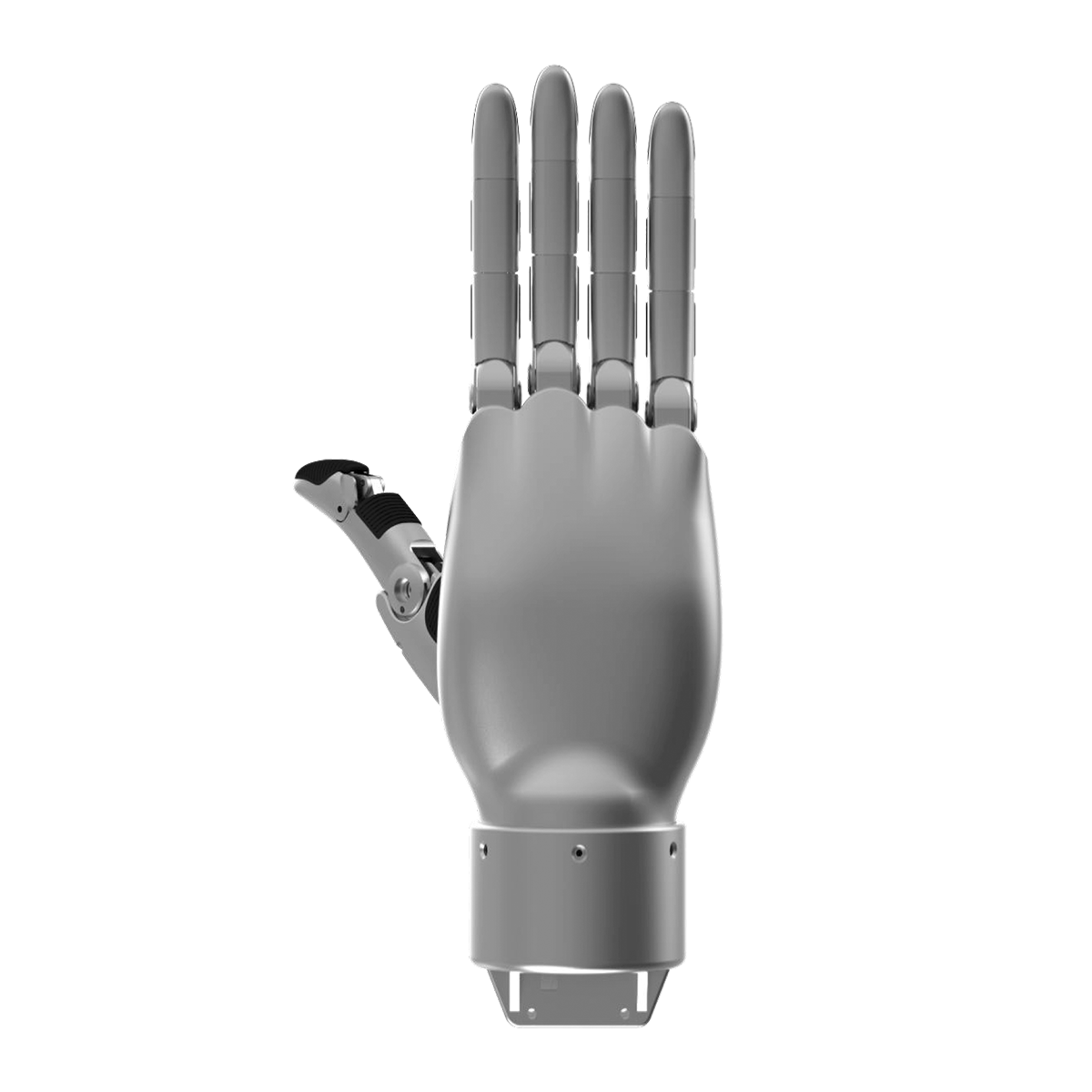
Linker Hand L20 Lite(ミドルレンジ・実戦型モデル)
フラッグシップ「L20」の高度な制御を継承しつつ、高剛性なリンク機構を採用した実戦型モデルです。自社開発モーターとの融合により、ダイナミックな動きでも優れた安定性と精密な制御を両立。人間の主要な動きを網羅する10 Activeを備え、複雑なタスクへの対応力と導入コストを高い次元で最適化しました。研究開発からサービス実装まで、多目的に活用できる高性能プラットフォームです。
主な特長

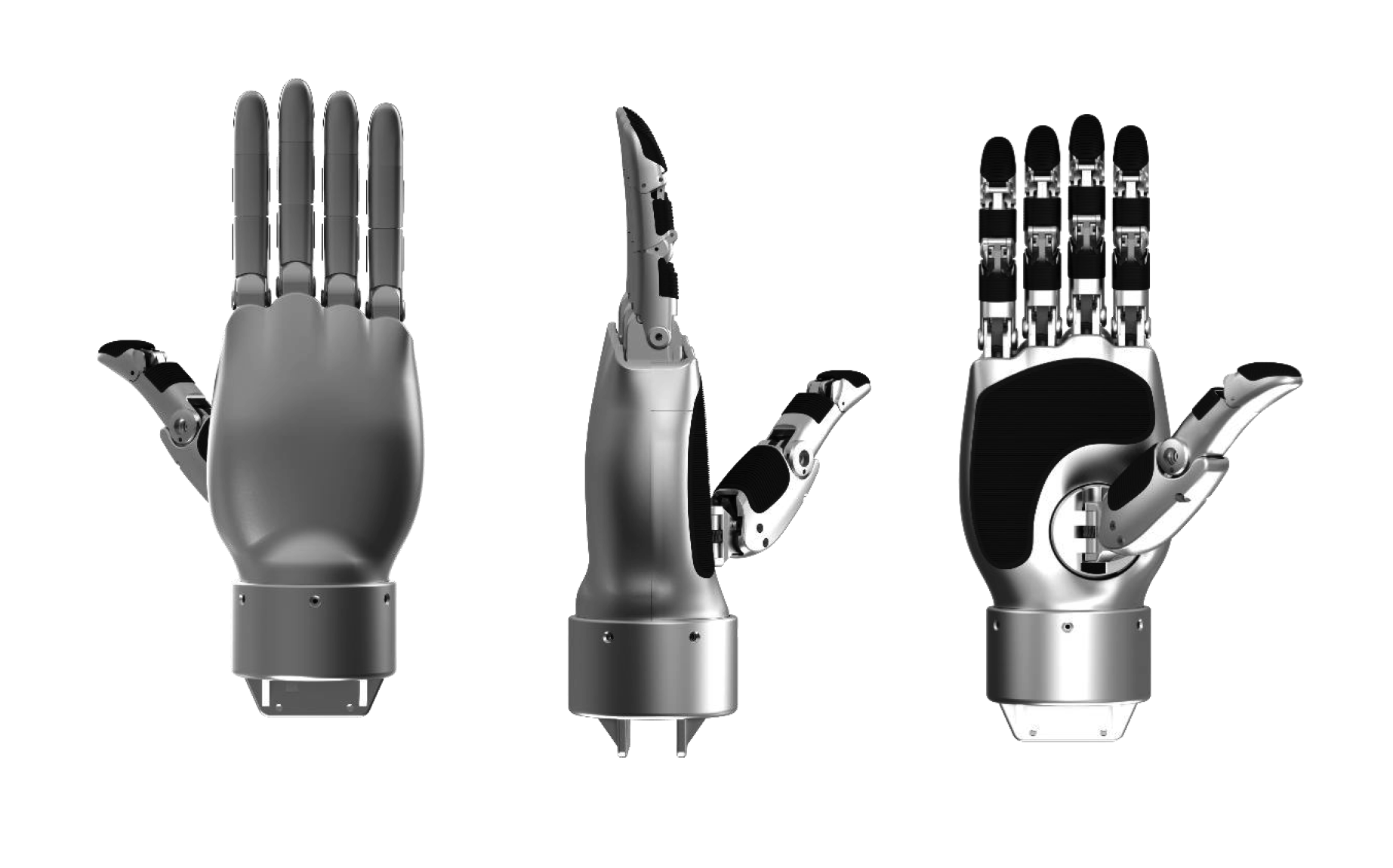
高自由度な関節構造
各指に独立した4自由度を配置。複雑かつ繊細なタスクにおいても、人間の手に近い滑らかな操作を実現し、高度な作業ニーズに応えます。

マルチセンシングシステム
カメラやタクタイル・センサ(電子皮膚)等、先進のマルチセンサを統合。全方位的な視覚・触覚情報の取得により、複雑な認識とインタラクションを可能にします。

エッジ・クラウド
統合ソリューション
独自の「端云融合」技術により、クラウド上のスキルライブラリから最適化された動作を迅速にデプロイ。開発工数の削減と容易なカスタマイズを両立します。
プロダクト・エコシステム
- 対応ロボットアーム
- UR、Franka、xArm、RealMan、AgileX
- 対応データ収集方式
-
テレオペレーション・グローブ(外骨格型 / 液体金属センサー内蔵)、
ビジョンベース(視覚認識)、VR(Meta Quest 3) - 対応シミュレーター
- Pybullet、Isaac、MuJoCo
- インターフェース
- CAN、RS485
- 活用事例
- ROS1、ROS2、Python、C++
活用事例
10 Activeの最適化された関節配置と高剛性リンク機構が、確実なホールドと表現力豊かな動作を両立します。
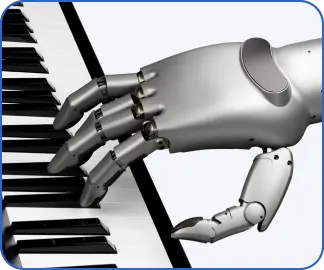
独立した指先制御による
繊細なキー・タイピング

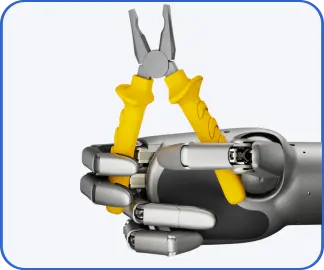
高剛性リンク機構による
安定した物体の把持と運用
10 Activeが創り出す
スムーズで多彩なハンドサイン

実用シーンに最適化された
確実なツール・ハンドリング
デモンストレーション動画
滑らかで淀みのない動き:
ジャンケン・デモンストレーション
この性能でこの価格:
ミドルレンジの常識を覆すコストパフォーマンス
スタートガイド:
PC接続・基本操作編
スタートガイド:
Raspberry Pi(ラズベリーパイ)連携編
製品スペック
| 自由度 (DoF) | 20 |
|---|---|
| 関節数 | 10 Active + 10 Passive |
| 伝達方式 | リンク駆動 (Linkage Drive) |
| 駆動方式 | 自社開発関節モジュール |
| 制御インターフェース | CANまたはRS485 |
| 重量 | 800g |
| 最大可搬重量 (Max Load) | 25kg |
| 動作電圧 | DC24V±10% |
| 待機電流 | 0.2A |
| 無負荷時平均電流 | 0.5A |
| 最大電流 | 3A |
| 繰返し位置決め精度 | ±0.20mm |
| 親指指先最大力 | 15N |
| 四指指先最大力 | 15N |
| 親指側方回転範囲 | 0.75 rad ( 43° ) |
| 四指屈曲角度 | 1.36 rad ( 78° ) |
| 親指側振速度 | 1.1 rad/s ( 63.21°/s ) |
| 四指屈曲速度 | 1.11 rad/s ( 63.33°/s ) |
| 親指屈曲速度 | 0.78 rad/s ( 44.7°/s ) |