製品情報
Linkerbot Linker Hand L30
人手を超える再現度を、その手に。
腱駆動が切り拓く、ヒューマノイドの最高峰。






- 製品概要
製品概要

次世代ロボットハンド
Linker Hand シリーズ、日本上陸
17 Active / 腱駆動システム。
超高分子量ポリエチレン腱と高精度モーターの融合により、21の関節が織りなす究極の器用さを実現。
人間の手の構造をミリ単位で復刻し、複雑な微細操作を可能にしたフラッグシップ・プレミアムモデル。
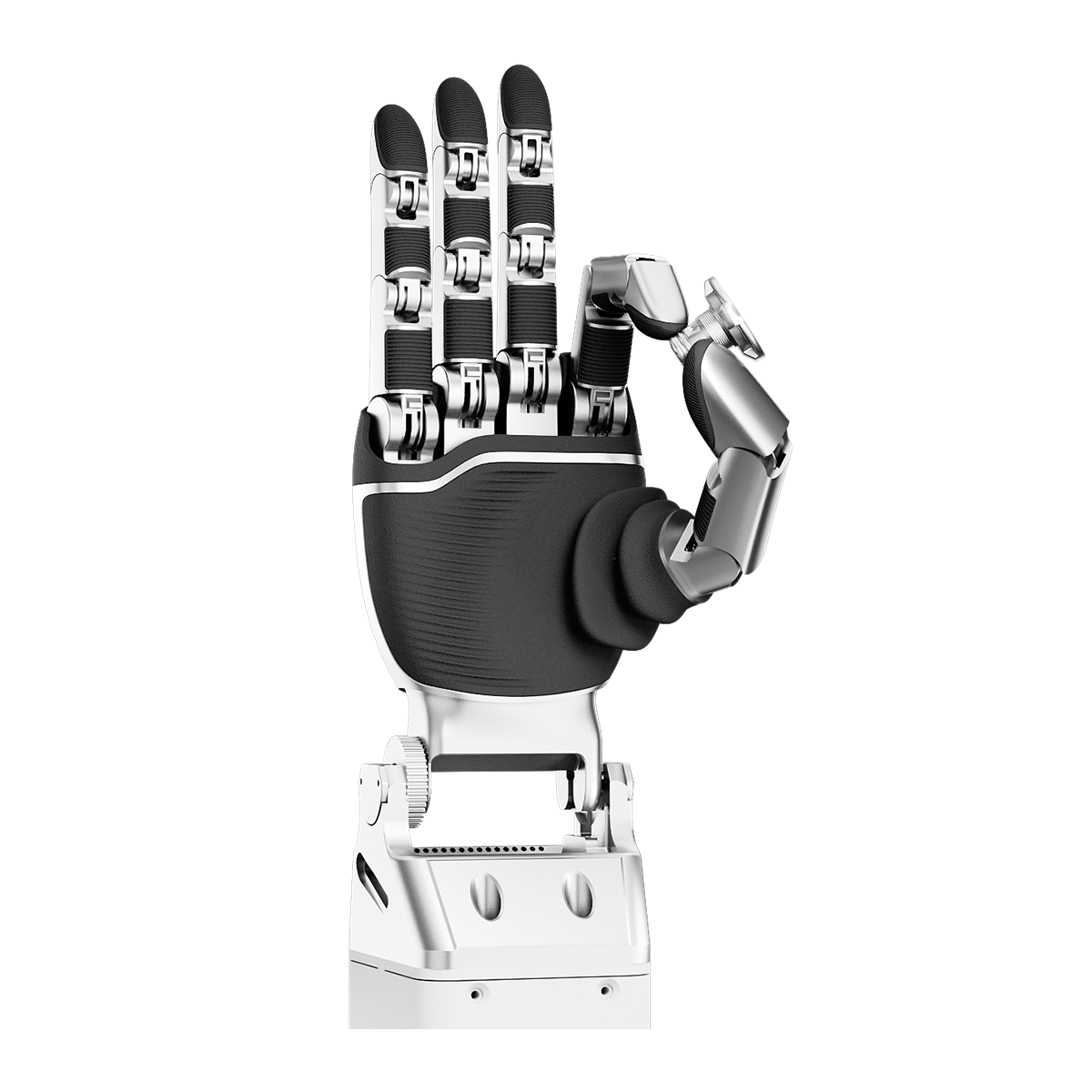
Linker Hand L30(フラッグシップ・腱駆動モデル)
人間の手の複雑な動きを完全再現するために設計された、シリーズ最高峰のフラッグシップモデルです。革新的な腱駆動システムにより、5指 21自由度(Active17)という圧倒的な可動域を実現。指先に触覚センサアレイを内蔵し、±0.20mmの繰返し精度で繊細な力制御が可能です。科学研究から高度な医療補助、複雑な産業用組立まで、次世代のロボティクスを牽引する最高性能のプラットフォームです。

主な特長

高度なバイオニクス構造
人手の構造を忠実に再現した5指 21自由度(Active17)設計。先進の腱駆動システムにより、極めて自然で滑らかな手指の動きを実現します。

高精度モーションコントロール
繰返し精度±0.20mm、把握力分解能0.5Nを誇る精密制御。各指の独立制御により、繊細なピッキングから複雑な操作まで確実に行います。

強力かつ柔軟な把握能力
最大20Nの把握力と8kg以上の耐荷重を実現。独自の対向配置と多彩な把持モードにより、重量物から微細な部品まで柔軟に適応します。

優れたレスポンス性能
腱駆動システムが最大20cm/sの高速動作を可能に。瞬時の反応が求められる動的なタスクにおいても、遅延のない高度なパフォーマンスを発揮します。

インテリジェントな制御・統合
RS485およびROSに対応し、多様なロボットシステムとシームレスに統合。遠隔操作やAIインタラクションなど幅広い高度な運用を支援します。
プロダクト・エコシステム
- 対応ロボットアーム
- UR、Franka、xArm、RealMan、AgileX
- 対応データ収集方式
-
テレオペレーション・グローブ(外骨格型 / 液体金属センサー内蔵)、
ビジョンベース(視覚認識)、VR(Meta Quest 3) - 対応シミュレーター
- Pybullet、Isaac、MuJoCo
- インターフェース
- CAN、RS485
- 活用事例
- ROS1、ROS2、Python
デモンストレーション動画
Linker Hand Ultra:衝撃の解禁
SFの世界を現実へと変える、究極のヒューマノイドハンド・テクノロジー
製品スペック
| 自由度 (DoF) | 21 |
|---|---|
| 関節数 | 17 Active + 4 Passive |
| 伝達方式 | 腱駆動 (Bionic Tendon Drive) |
| 駆動方式 | 自社開発関節モジュール |
| 制御インターフェース | U2D2-TTL |
| 重量 | 1400g |
| 最大可搬重量 (Max Load) | 2kg |
| 動作電圧 | DC12V |
| 待機電流 | 0.45A |
| 無負荷時平均電流 | 0.63A |
| 最大電流 | 4.4A |
| 繰返し位置決め精度 | ±0.20mm |
| 親指指先最大力 | 4N |
| 四指指先最大力 | 3.5N |
| 親指側方回転範囲 | 1.323 rad ( 75.8° ) |
| 四指屈曲角度 | 1.471 rad ( 84.3° ) |
| 親指側振速度 | 7.093 rad/s ( 406.3°/s ) |
| 四指屈曲速度 | 7.744 rad/s ( 443.6°/s ) |
| 親指屈曲速度 | 7.638 rad/s ( 437.6°/s ) |