製品情報
Linkerbot Linker Hand L6
シンプルさが、可能性を広げる。
堅牢さと扱いやすさを究めた、5本指ハンドの導入解。


- 製品概要
製品概要

次世代ロボットハンド
Linker Hand シリーズ、日本上陸
6 Active / リンク機構駆動。
連動リンク機構と自社開発モーターの統合により、牽引時の動的安定性を極限まで向上。
高いメンテナンス性と環境適応力を備え、R&Dから実運用までを強力に支援する戦略的スタンダードモデル。
Linker Hand L6(高耐久・スタンダードモデル)
6 Activeを備えた、高剛性リンク機構採用の多指ハンドです。専用設計の自社開発モーターとリンク駆動を高度に融合し、牽引時の動的安定性と精緻な位置決め制御を両立。上位モデルの制御アルゴリズムを継承しつつ、ハードな実運用に耐えうる堅牢な構造を実現しました。研究開発からサービス実装まで、コストパフォーマンスと信頼性を高い次元で最適化。社会実装のための高性能プラットフォームです。
主な特長

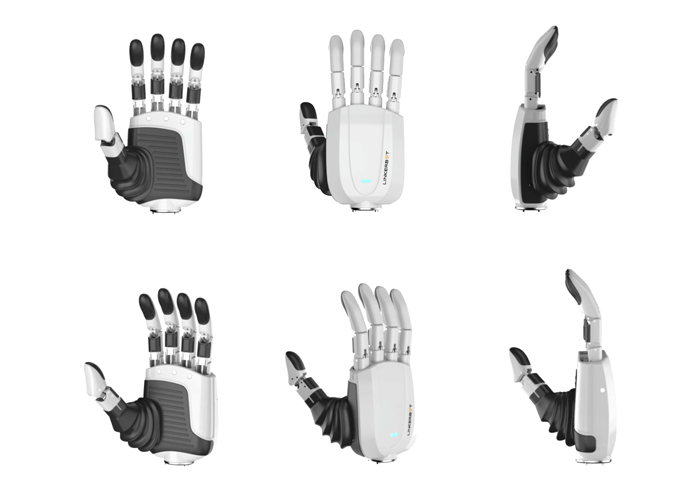
高自由度な関節構造
各指に独立した4自由度を配置。複雑かつ繊細なタスクにおいても、人間の手に近い滑らかな操作を実現し、高度な作業ニーズに応えます。

マルチセンシングシステム
カメラやタクタイル・センサ(電子皮膚)等、先進のマルチセンサを統合。全方位的な視覚・触覚情報の取得により、複雑な認識とインタラクションを可能にします。

エッジ・クラウド
統合ソリューション
独自の「端云融合」技術により、クラウド上のスキルライブラリから最適化された動作を迅速にデプロイ。開発工数の削減と容易なカスタマイズを両立します。
活用事例
最適化された6 Activeと高剛性リンク機構が、ハードな使用環境下でも揺るぎない安定性と確実な把持能力を提供します。

高トルク駆動と剛性
重量物に対する安定した把持性能

優れた応答性と制御精度
複雑な工具を用いたツール・ハンドリング

緻密なポジショニング
計測機器の把持と精緻なハンドリングの両立

高精度な指先制御
微細な対象物への柔軟なアプローチ
製品スペック
| 自由度 (DoF) | 11 |
|---|---|
| 関節数 | 6 Active + 5 Passive |
| 伝達方式 | リンク駆動 (Linkage Drive) |
| 駆動方式 | 自社開発関節モジュール |
| 制御インターフェース | CANまたはRS485 |
| 重量 | 607g |
| 最大可搬重量 (Max Load) | 28kg |
| 動作電圧 | DC24V±10% |
| 待機電流 | 0.2A |
| 無負荷時平均電流 | 0.6A |
| 最大電流 | 5.6A |
| 繰返し位置決め精度 | <±0.20mm |
| 親指指先最大力 | 12N |
| 四指指先最大力 | 15N |
| 親指側方回転範囲 | ー |
| 四指屈曲角度 | 1.18 rad ( 68° ) |
| 親指側振速度 | 3.51 rad/s ( 202°/s ) |
| 四指屈曲速度 | 3.5 rad/s ( 201°/s ) |
| 親指屈曲速度 | 2.28 rad/s ( 131°/s ) |