製品情報
NAVISキット
NAVIS は、さまざまなオンボードセンサーとシステムからのデータを統合して処理し、ロボットが環境と対話して、複雑な産業および商業環境で運用パフォーマンス、安全性、機能を最適化します。この高度なシステムにより、ロボットは半密閉環境と密閉環境の両方で自律的に移動できるようになります。



- 製品概要
製品概要

-
ユーザーフレンドリーな
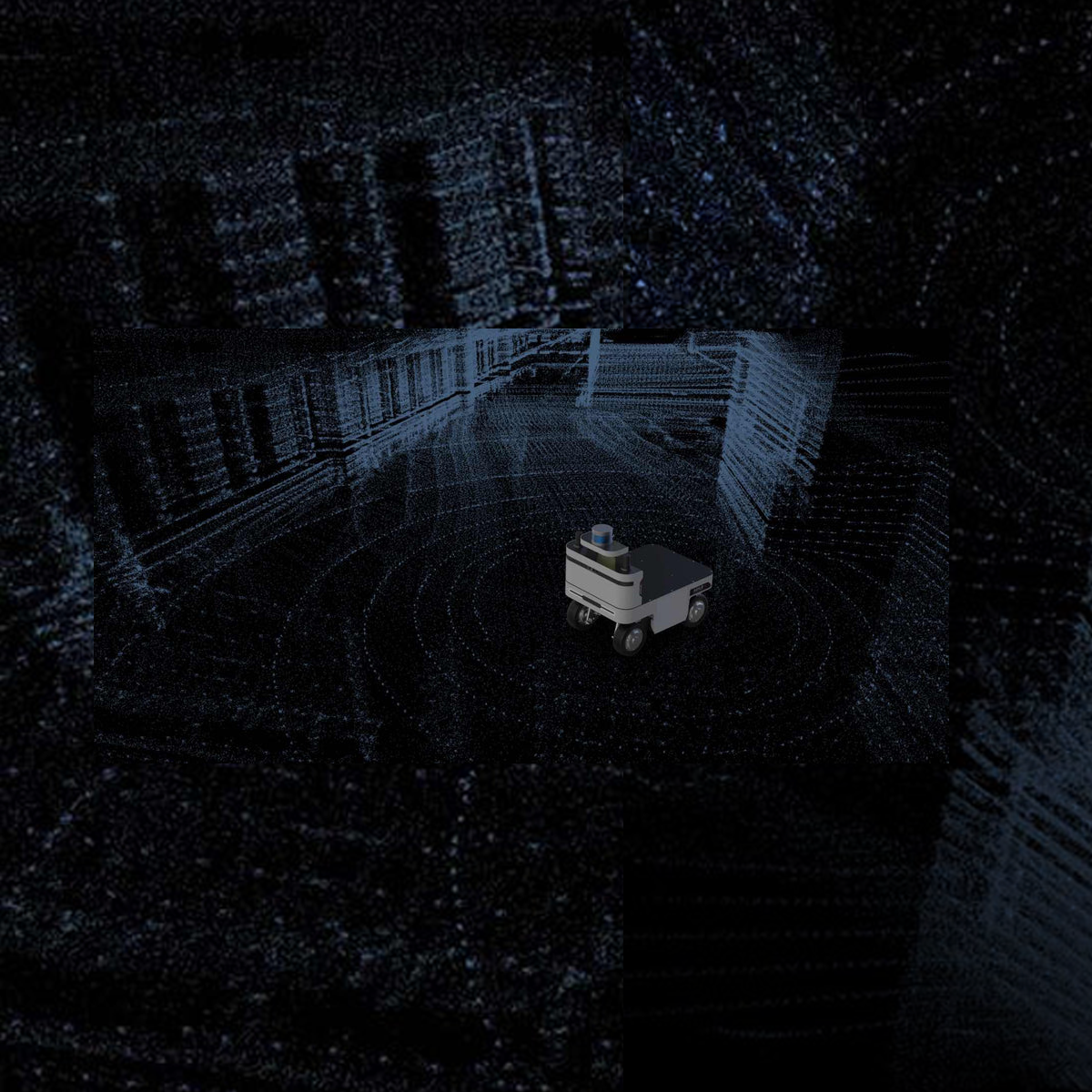
3Dナビゲーション複雑な3D環境でのシームレスなナビゲーションを実現する
直感的なインターフェイスにより、
空間認識と操作効率が向上します。 -
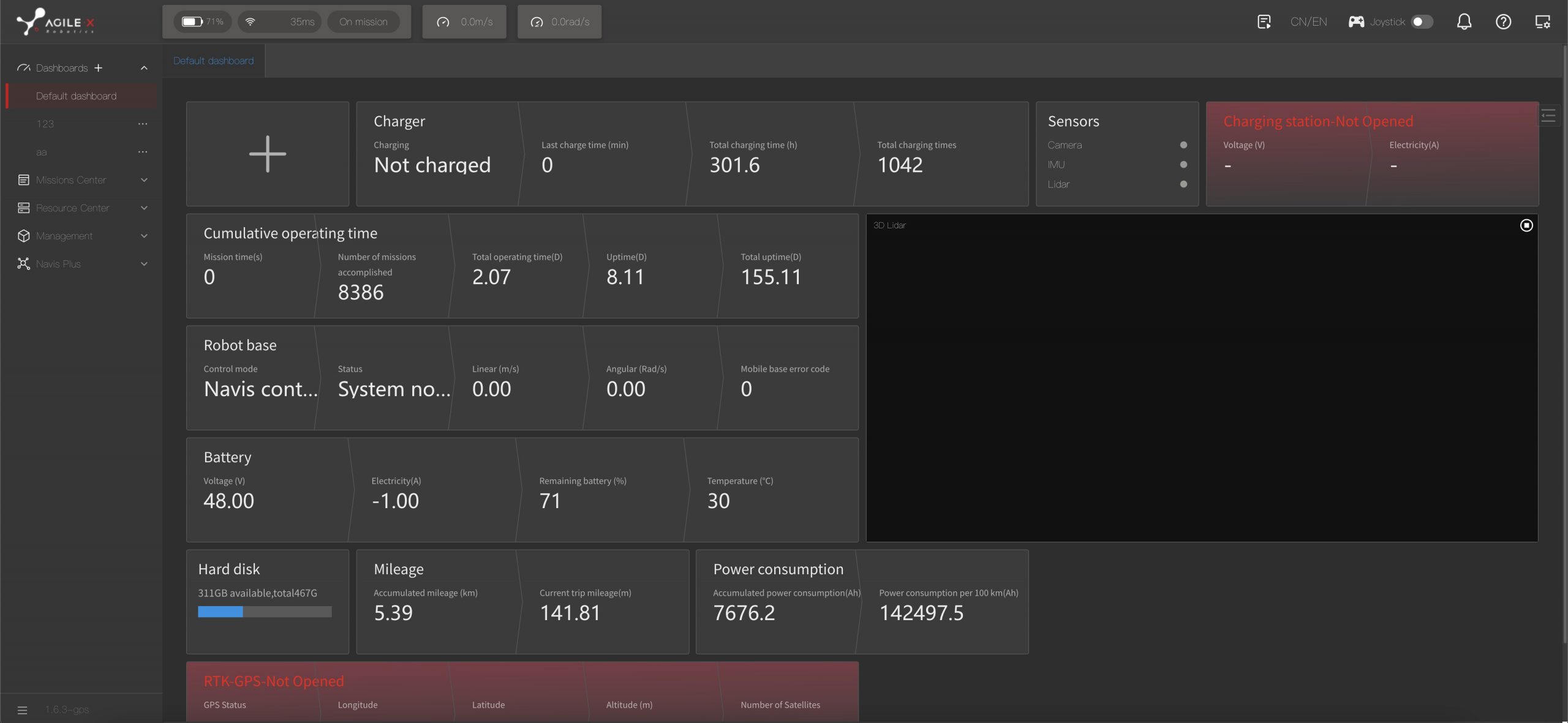
カスタムデータダッシュボード
データの視覚化を使用して、
あらゆるデスクトップやモバイル デバイスで
リアルタイムの洞察と分析を実現します。 -
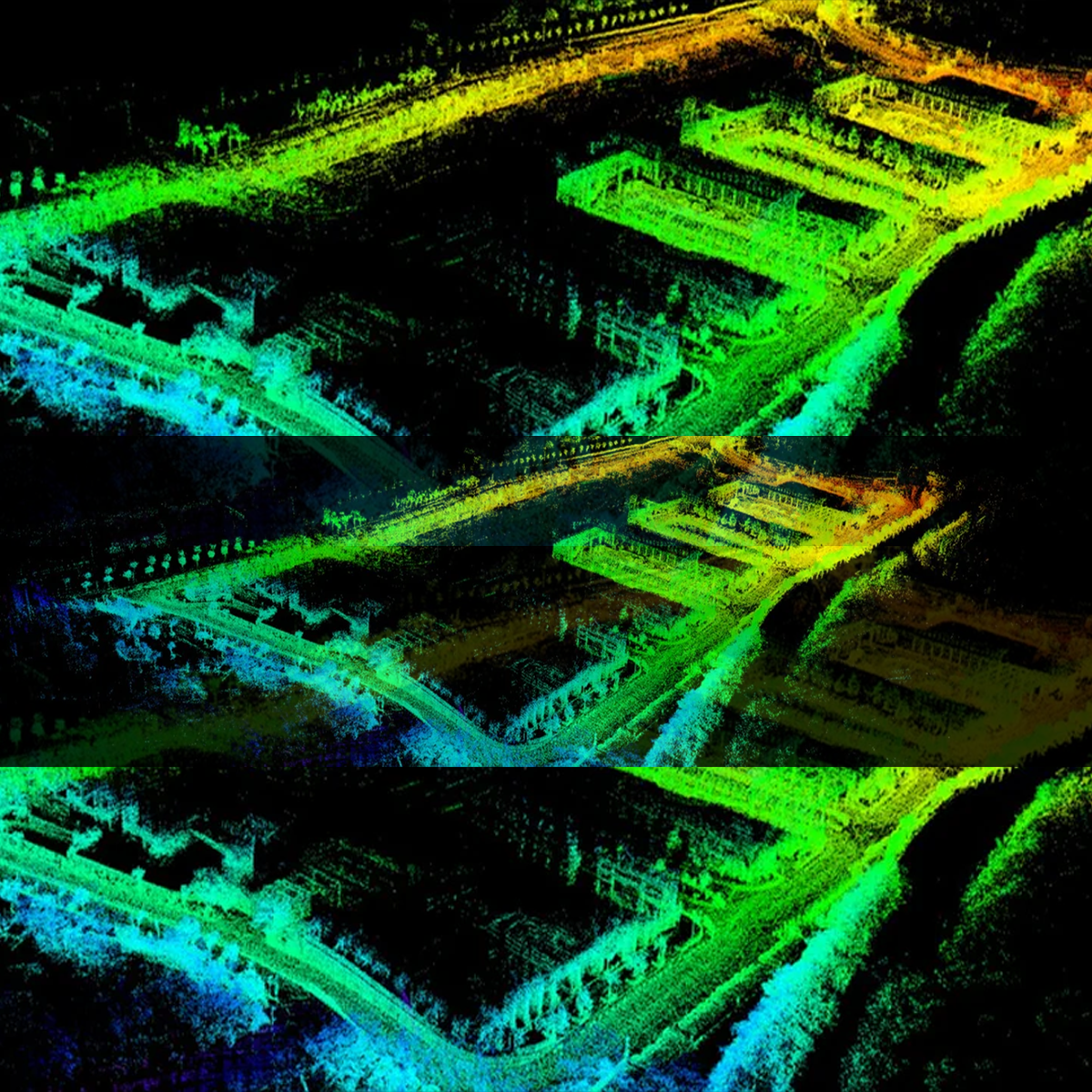
ワンクリックマッピング
広範囲をカバーする高度な認識。
-
リアルタイムマップ編集
環境の変化や運用要件に応じて
リアルタイムで調整できる動的なマップ編集ツール。 -
クイックタスクの追加
さまざまなシナリオにわたって迅速かつ効率的にミッションを計画
および実行するための合理化されたタスク設定インターフェイス。 -
簡単に統合
包括的なSDK、API、ROS2互換性、
詳細な実装ガイド、
広範な技術サポートを活用して、
NAVISを産業用ロボットやAGVにシームレスに統合します。 -
シームレスなリモートテイクオーバー
強力なリモートコントロール機能により、
必要に応じて即座に人間による介入やガイダンスが可能になり、
運用の柔軟性と安全性が確保されます。 -
リアルタイムシステムアップデート
NAVISはリアルタイム更新のためにHttp equestを使用しています。
コアシステムコンポーネント
NAVISは、高度な自律ナビゲーションを実現するためにシームレスに動作する3つのコアコンポーネントで構成されています。
ナビゲーションパネル
これは、ロボットをリモートで監視および制御するための主要なインターフェースです。ロボットとオペレーター間の継続的な通信を確保し、安全な操作のための包括的な情報を提供するように設計されています。
タスク管理システム
ロボットのオンボード制御システムは、ナビゲーションからシステム診断まで、すべての動作面を管理します。ロボットの動作が正確かつ効率的に実行されるようにする上で重要な役割を果たします。
視覚フィードバックシステム
このシステムはリアルタイムの視覚フィードバックを提供し、ロボットの周囲のあらゆる場所を視覚的に把握できます。安全なナビゲーションには欠かせないもので、環境条件や潜在的な障害物をリアルタイムで評価できます。
柔軟なアクションプランの実行
NAVISは、独自のLiDAR-IMUセンサー融合、リアルタイムの経路計画と調整、高度な障害物検出と回避、インテリジェントな意思決定アルゴリズムを通じて、動的なナビゲーションを実現します。
