- TOP
- 製品情報
- 3Dカメラ
- StereoLabs
- StereoLabs ZED Xシリーズ
製品情報
StereoLabs ZED Xシリーズ
空間認識用の産業用ステレオカメラ





- 製品概要
製品概要

高度な空間認識を、今すぐ現場へ
GMSL2接続対応・グローバルシャッター搭載
「ZED X シリーズ」
Stereolabs独自の「Terra AI」センシング・テクノロジーを搭載したZED Xは、
マシンの自動化やデジタルツイン・アプリケーション向けに開発された強力なステレオカメラです。
堅牢なアルミニウム筐体、IP67準拠の防塵・防水性能、高性能IMU、信頼性の高いGMSL2接続、
そして外部フレーム同期機能を備え、過酷なフィールド運用にも即座に対応します。
グローバルシャッターが実現する、圧倒的なディテール
1920×1200のデュアル・グローバルシャッター・カラーセンサーを搭載。動きの激しい環境下でも、あらゆるアクションを逃さず、極めて鮮明な映像をキャプチャします。
堅牢でセキュアなGMSL2接続
ZED XシリーズのGMSL2出力は、ロボティクスにとって理想的なインターフェースです。堅牢なロック機構付きのインターフェースを通じて、低遅延かつ電磁干渉(EMI)の影響を受けない安定したビデオ伝送を、NVIDIA® Jetson Orin™へ最大15mの距離で実現します。
高度なマルチカメラ同期
接続された複数のデバイス間で、100マイクロ秒以内のフレーム単位でのハードウェア同期を実現します。複数のRGB画像およびデプス画像を完全に同期・整列した状態でキャプチャできるため、環境全体のパノラマビューや多角的な視覚情報の構築を正確に行うことが可能です。
産業グレードの堅牢なエンクロージャ
IP67規格に準拠した堅牢な筐体は、農業や過酷な産業環境での運用に最適です。モバイルロボット(自律走行ロボット)に不可欠な防塵・防水性能を完全に備えており、粉塵や水の浸入からデバイスを確実に保護します。
高性能IMU
(慣性計測装置)
最新のIMUは、16ビットの3軸加速度計と3軸ジャイロスコープを統合。耐振動性に優れ、極めて低いノイズレベルとバイアス安定性を実現しています。これにより、ロボットの動きを極めて正確に捉える、卓越したモーショントラッキング性能を提供します。
次世代AIエンジン「Terra AI」によるニューラルデプス
Stereolabsが独自に開発したAIモデル「Terra AI」を搭載し、デプスマップの生成速度を300%以上高速化。テクスチャのない表面や過酷な照明条件下でも高い堅牢性を発揮し、10cmから数十メートルまで、極めて正確な距離測定を可能にします。
3つのフォルムが、無限の可能性を切り拓く
ZED Xシリーズは、最先端の領域に挑むロボットエンジニアのニーズを満たすよう設計されています。
全モデルにグローバルシャッター・センサーと高信頼のGMSL2接続を採用。
障害物検知やナビゲーションに長けた「ZED X」、そしてピッキングなどの近接作業に特化した「ZED X Mini」など、
用途に合わせた最適な選択が可能です。

ZED X Nano
超小型・軽量設計を実現したZED X Nanoは、次世代のPhysical AI(フィジカルAI)やヒューマノイドロボットに最適な、究極の空間認識ソリューションを提供します。
- ステレオベースライン: 18mm
- シャッター方式: グローバルシャッター
- 解像度/フレームレート: 1920×1200 ×2 @60fps
- IMU: 高性能IMU内蔵
- 同期・接続: GMSL2接続 / 外部同期対応

ZED X Mini
ZED X Miniは、農業、物流、建設分野におけるマニピュレーションタスクに理想的です。特に自動化やピッキングなど、近距離での運用に最適化されています。
- ステレオベースライン: 50mm
- シャッター方式: グローバルシャッター
- 解像度/フレームレート: 1920×1200 ×2 @60fps
- IMU: 高性能IMU内蔵
- 同期・接続: GMSL2接続 / 外部同期対応

ZED X
ZED Xは、高速で動く対象を精密に捉えるためのベストチョイスです。自己位置推定や高速自動化ライン、ブレが許されない動的な環境で真価を発揮します。
- ステレオベースライン: 120mm
- シャッター方式: グローバルシャッター
- 解像度/フレームレート: 1920×1200 ×2 @60fps
- IMU: 高性能IMU内蔵
- 同期・接続: GMSL2接続 / 外部同期対応
あらゆる速度で、揺るぎない鮮明さを
ZED Xに搭載されたグローバルシャッターは、ダイナミックレンジや画質を一切損なうことなく、
あらゆる動きを瞬時に捉えます。高速移動時も、像がブレたり直線が歪んだりすることはありません。
すべてのシーンにおいて、完璧なピクセル精度を実現します。
ビデオおよびデプス解像度
ピクセルサイズ
1920×1200 解像度時
(オプションA)
960×600 解像度時
(オプションB)
比類なきレンズクオリティ
9枚構成のガラスレンズ、高いMTF(解像性能)、高度な光学歪み補正を備えたZED Xの新しい光学系は、ステレオカメラ史上、最も先進的なレンズです。広角な視野を確保できる「2mmレンズ」、または遠距離でのデプス精度と画質を向上させる「4mmレンズ」の2種類から、用途に合わせて選択いただけます。
2種類の焦点距離から選択可能
焦点距離 2mm オプション
焦点距離 4mm オプション
あらゆる環境に耐えうる、強固な設計
ZED Xは、過酷な現場での運用を想定して設計されています。IP67準拠の筐体とGMSL2接続により、粉塵や水の浸入を防ぎ、24時間365日の安定した連続稼働を実現します。周囲の環境を絶え間なく捉え続けることで、非定型な環境や予測不能な条件下においても、ロボットの確実な自律走行をサポートします。

アルミニウム筐体
動作温度 (-5 ~ 130 °F)
防塵・防水性能
インターフェース
世界最先端のビジョンソフトウェア・スタックを搭載
ZED Xステレオカメラは、物理的な世界を仮想空間に忠実に再現する、世界最先端のステレオデプス・センシング技術「Neural Depth Engine 2」を採用しています。
自己位置推定(Localization)
最新のZED SDKを使用することで、複数のZED Xカメラからの位置情報と全地球測位衛星システム(GNSS)のデータを統合。極めて高精度な3Dポジショニングを実現します。

物体検知(Object detection)
ZED SDKは、デプス情報とビジュアル・オドメトリを組み合わせることで、ロボット周辺の占有格子地図(Occupancy Map)を作成します。これにより、屋内外の非定型な環境においても、安全なナビゲーションが可能になります。
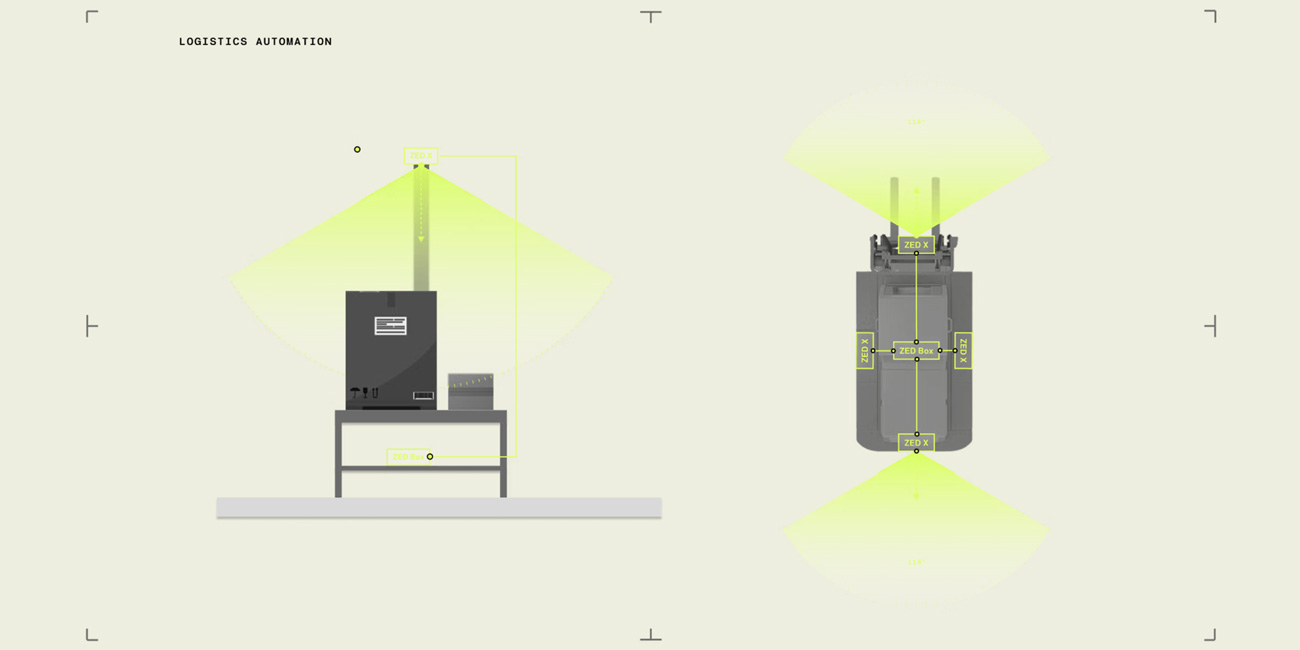
ロボットに、現実世界を見通す視覚を
複雑で予測不可能な地形をナビゲートするために、自律走行モバイルロボットには、あらゆる角度から周囲の環境を絶え間なく見渡し、理解する能力が求められます。ZED Xが提供する人間のような視覚は、ロボットの社会実装を成功させるために不可欠な「視力」と「洞察力」をロボットに授けます。

フィジカルAIのトレーニング
ロボットによるマニピュレーション(手先作業)を強化し、模倣学習を加速。次世代の「フィジカルAI」アプリケーションに向けた高スループットなデータ収集を可能にします。


マルチカメラ構成に最適化
ハードウェア同期を用いることで、Jetson AGX Orinに最大4台のZED Xカメラを接続可能です。
ZED SDKを活用すれば、複数台のカメラから得られるポイントクラウド(点群)やオドメトリを統合し、
単一のデータソースとして一元管理できます。
スペック表
| モデル |
ZED X Nano
|
ZED X Mini
|
ZED X
|
|---|---|---|---|
| メカニカル (Mechanical) | |||
| 外形寸法 | 42.0 × 30.5 × 33.8 mm | 94 × 32 × 37 mm | 164 × 32 × 37 mm |
| ベースライン | 18mm | 50mm | 120mm |
| 重量 | 75g | 150g | 240g |
| 動作温度 | -20°C ~ +60°C | -20°C ~ +55°C | -20°C ~ +55°C |
| ビデオ出力 (Video Output) | |||
| ビデオ出力 | 1200p @ 60/30/15 FPS(出力解像度 サイドバイサイド:2× 1920×1200) 1080p @ 60/30/15 FPS(出力解像度 サイドバイサイド:2× 1920×1080) 600p @ 120/60/30/15 FPS(出力解像度 サイドバイサイド:2× 960×600) |
||
| ビデオ録画 | ネイティブ解像度でのビデオエンコード(H.264 / H.265 / ロスレス) | ||
| ビデオストリーミング | IPネットワークを通じたリモートストリーミングに対応(ZED SDK利用) | ||
| 深度 (Depth) | |||
| 深度範囲最大 | 0.03m~2.0m | 2.2mmレンズ:0.1m~8m 4mmレンズ:0.15m~12m |
2.2mmレンズ:0.3m~20m 4mmレンズ:1.0m~35m |
| 推奨範囲 | 0.05m~1.5m | 2.2mmレンズ:0.1m~4m 4mmレンズ:0.15m~6m |
2.2mmレンズ:0.3m~12m 焦点距離 1.0m~20m、レンズ径 4mm |
| 深度解像度 | ネイティブビデオ解像度 | ネイティブ・ビデオ解像度(Ultraモード時) | |
| 深度FPS | 最大120Hz | ||
| 深度技術 | ニューラル・ステレオ・デプス・センシング | ||
| モーション (Motion) | |||
| モーションセンサー | 16ビット加速度センサー(最大12g) 16ビットジャイロスコープ(最大1000°/秒) データレート:200Hz |
||
| ポーズ更新率 | 最大120Hz | ||
| ポーズ・ドリフト | 移動:0.3% 回転:0.003°/m (ループ補正なし) |
||
| モーションテクノロジー | 高度なセンサーフュージョンと熱補正を備えたビジュアル慣性ステレオSLAM | ||
| 物体検知 (Object Detection) | |||
| 検知対象 | 人、車両、カスタムオブジェクト(任意設定) | ||
| 物体トラッキング | 対応 | ||
| 出力データ | バウンディングボックス (2D/3D) 3D位置情報 速度 ユニークID セグメンテーションマスク |
||
| モーションテクノロジー | 高度なセンサーフュージョンと熱補正を備えたビジュアル慣性ステレオSLAM | ||
| 検知範囲 | 最大 2m (3D) | 最大 4m (2D) / 最大 20m (3D) | |
| スケルトントラッキング | ー | 18 / 34 / 38箇所のボディ・キーポイント 最大 15mの検知範囲 |
|
| レンズ (Lens) | |||
| レンズタイプ | 6枚構成 ハイブリッド・デュアルレンズ | 広角 9枚構成 全ガラス・デュアルレンズ(光学歪み補正済み) | |
| 絞り値(Aperture) | ƒ/2.5 | ƒ/2.2 (2.2mmレンズ) ƒ/1.8 (4mmレンズ) |
|
| 焦点距離 | 2.8mm | 2.2mm / 4mm 2.2mm / 3.8mm |
|
| 視野角 (FOV) | 最大 92°(H) × 65°(V) × 102°(D) (2.8mm時) | 最大 110°(H) × 80°(V) × 120°(D) (2.2mm時) 最大 80°(H) × 52°(V) × 91°(D) (4mm時) |
|
| 偏光フィルター | オプション | ||
| イメージセンサー (Image Sensors) | |||
| センサー解像度 | 2.3Mピクセル・デュアルセンサー(3μmピクセル) | ||
| センサーフォーマット | ネイティブ 16:10 フォーマット(より広い垂直視野角を実現) | ||
| センサーサイズ | 1/2.6インチ・高感度センサー(低照度対応) | ||
| セシャッター同期 | 電子同期式グローバルシャッター | ||
| カメラコントロール | 解像度、フレームレート、彩度、ガンマ、シャープネス、ホワイトバランス、露光時間/範囲、 センサーゲイン(アナログ/dB)、デジタルゲイン(ISP)、カラーバランス、ノイズ除去の調整が可能 |
||
| 接続 (Connectivity) | |||
| コネクタ | 同軸シリアル GMSL2 コネクタ(FAKRA Z型) | ||
| マウントオプション | 1/4″-20 UNC 三脚ネジ穴(底面) 2× M3 ネジ穴(底面) |
1/4″-20 UNC 三脚ネジ穴 2× M3 ネジ穴(底面) 4× M4 ネジ穴(背面) |
1/4″-20 UNC 三脚ネジ穴 2× M4 ネジ穴(底面) 4× M4 ネジ穴(背面) |
| 電源 | GMSL2経由の給電 (PoC) | ||
| キャプチャカード (Capture Card) | |||
| キャプチャカード互換性 | NVIDIA Jetson Orin および Xavier プラットフォーム | ||
| キャプチャカード電源 | Jetson Orin AGX の CSI ポート経由で給電 | ||
| 共通仕様 (Other) | |||
| 対応OS |
 JETSON L4T JETSON L4T |
||
| 外部連携 |
 UNITY UNITY UNREAL UNREAL OPENCV OPENCV ROS ROS ROS 2 ROS 2 PYTORCH PYTORCH DOCKER DOCKER MATLAB MATLAB PCL PCL C++ C++ PYTHON PYTHON C# C# |
||
| SDKシステム要件 | NVIDIA Jetson AGX Orin, Orin NX | ||
| 保証期間 | 2年間ハードウェア保証 | ||
※横にスクロールして比較できます