製品情報


- 製品概要
製品概要
コスト効率の高い屋内および屋外の高速シャトル
ワイヤー制御シャーシ AGV 開発プラットフォーム
ボリュームもさらにコンパクトになりました。高速、高搬送能力、強力なパワーの組み合わせにより、開発者は、低コスト、高効率、迅速な導入で、単一の処理効率において大きな利点を得ることができます。 TRACER Miniは、より多くの科学研究大学がROSロボットの科学研究と教育、屋内無人輸送、サービスロボットの研究とプロジェクト開発を実現するための信頼できる開発および実験プラットフォームを迅速に確立できるように設計されており、同時に商用グレードのスマートも提供します。工場内および外部のサービスロボットは、より優れた開発プラットフォームを提供します。
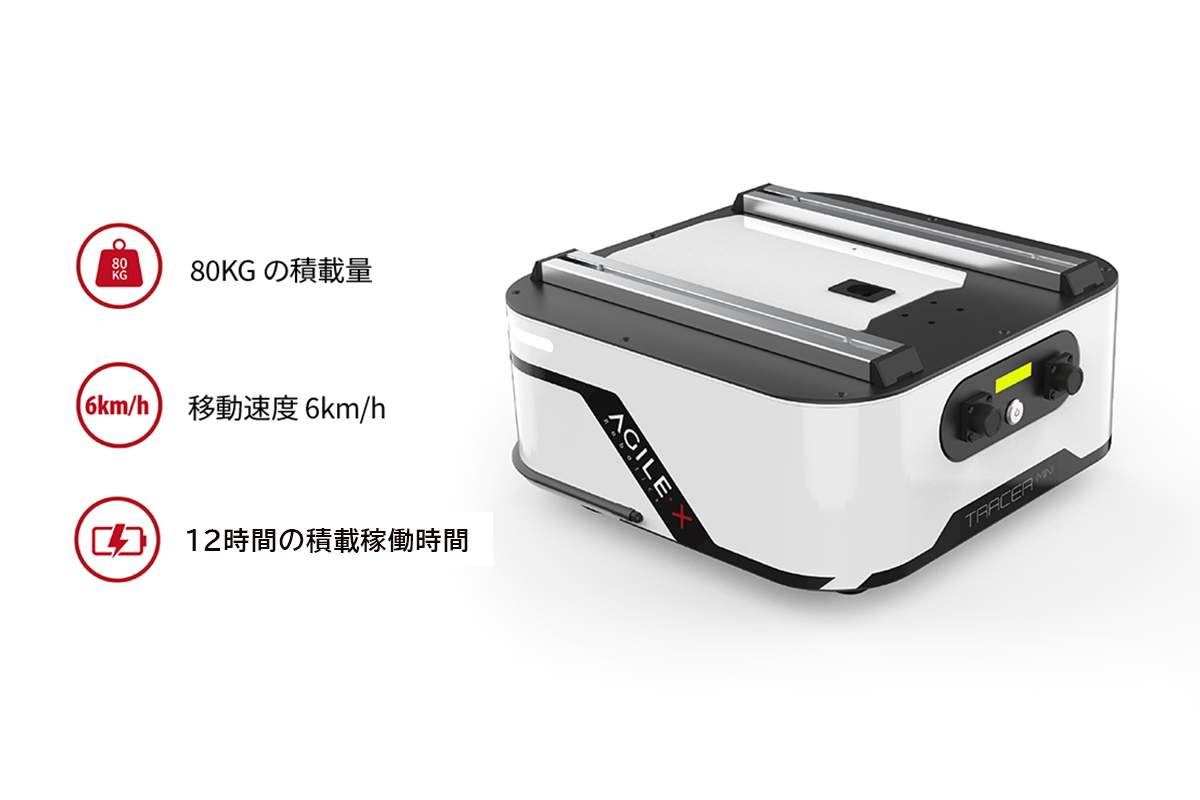
TRACER Mini
TRACER Miniはスイングアームサスペンションスチールボディを採用し、差動回転を実現するユニバーサルホイールを駆動する二輪駆動設計を採用しており、小さな坂道を登るパワーを備えているだけでなく、屋外の従来の道路環境への適応性ももたらします。

シンプルな構造と非常に強力な積載能力
TRACER Mini は、高速、高搬送能力、強力なパワーを兼ね備えており、単一のハンドリング効率に大きな利点をもたらし、無人倉庫ロボット輸送を費用対効果と効率の高いものにします。
インテリジェント システムを拡張するための包括的なオープンソース ソフトウェアとハードウェア
TRACER Mini モバイル シャーシには、関連する ROS ノードがプリインストールされており、軽量動作モードに適応できます。ユーザーは、CAN バス プロトコルを通じてメイン コントロールと通信し、完全なオープンソース ソフトウェアおよびハードウェア プラットフォーム、外部ハードウェア サポートにより、高度な自動運転システムなどの豊富なインテリジェント システムに拡張できます。

コアアプリケーションの迅速展開
便利でプロフェッショナルな開発プラットフォームを提供し、豊富なソフトウェアおよびハードウェア開発エコシステムの構築にも取り組んでいます。つまり、開発者に詳細な開発マニュアル文書、ROS ロボット開発チュートリアル、オープンソース SDK、ROS_PACKAGE を提供し、プロフェッショナルな技術サポートを提供します。
マルチロード拡張二次開発
TRACER mini は軽量動作モードに適応でき、ユーザーは CAN バス プロトコルを通じてメイン コントロールと通信できます。また、オープンソース SDK および ROS パッケージも提供します。

ELSA型番:ELRAG-TCMH00R / JANコード:4524076150187