- TOP
- 製品情報
- ロボットハンド
- INSPIRE-Robots
- INSPIRE-Robots RH56シリーズ
製品情報
INSPIRE-Robots RH56シリーズ
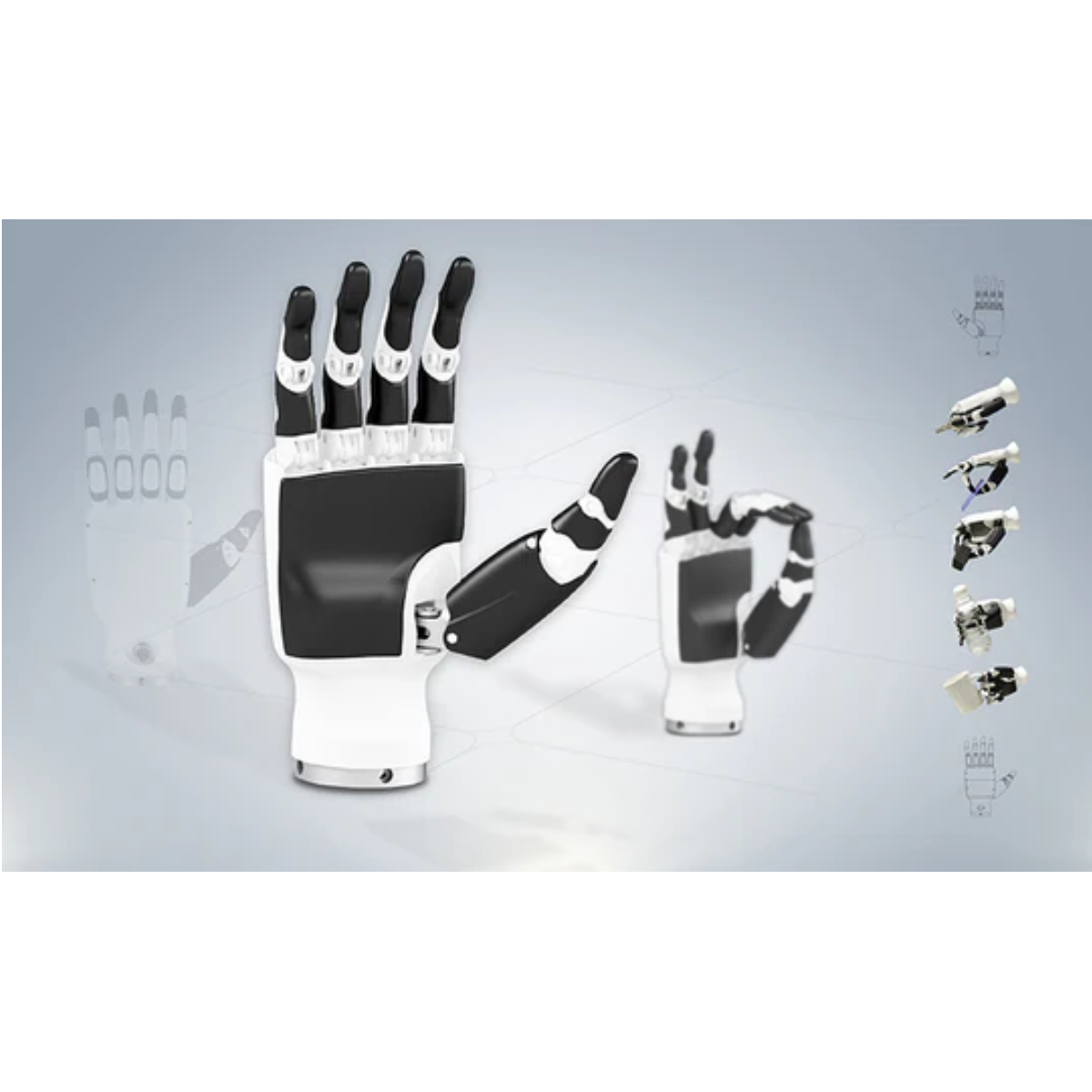
Dexterous Handsは、6つの小型リニアサーボドライブと6つの圧力センサーを内蔵した革新的なリニアドライブ設計を特徴としています。


- 製品概要
製品概要
RH56シリーズ
RH56F1(L) / (R)
高精度な触覚制御と安定した動作
触覚、力覚、位置、温度の4種類のセンサーを合計24個搭載。
ボディはオールメタル一体型フレームを採用し、優れた剛性を実現。ソフトウェアは、複数のセンサーとアルゴリズムを高度に融合させることで、マルチモード制御を可能にしています。
最大受動荷重能力30kg、1kHzのリアルタイム通信、その他20項目に及ぶ厳格な試験をクリアした多機能ハンドです。
機械式手首が必要な場合は、「手首付き」パッケージを選択してください。

| 型番 | 備考 |
|---|---|
| ELRIR-0F1H00R | ロボットハンド「RH56F1」の左手 |
| ELRIR-0F1H01R | ロボットハンド「RH56F1」の右手 |
| ELRIR-F1EH00R | ロボットハンド「RH56F1」の左手(触覚機能搭載バージョン) |
| ELRIR-F1EH01R | ロボットハンド「RH56F1」の右手(触覚機能搭載バージョン) |
RH56BFX(L) / (R)
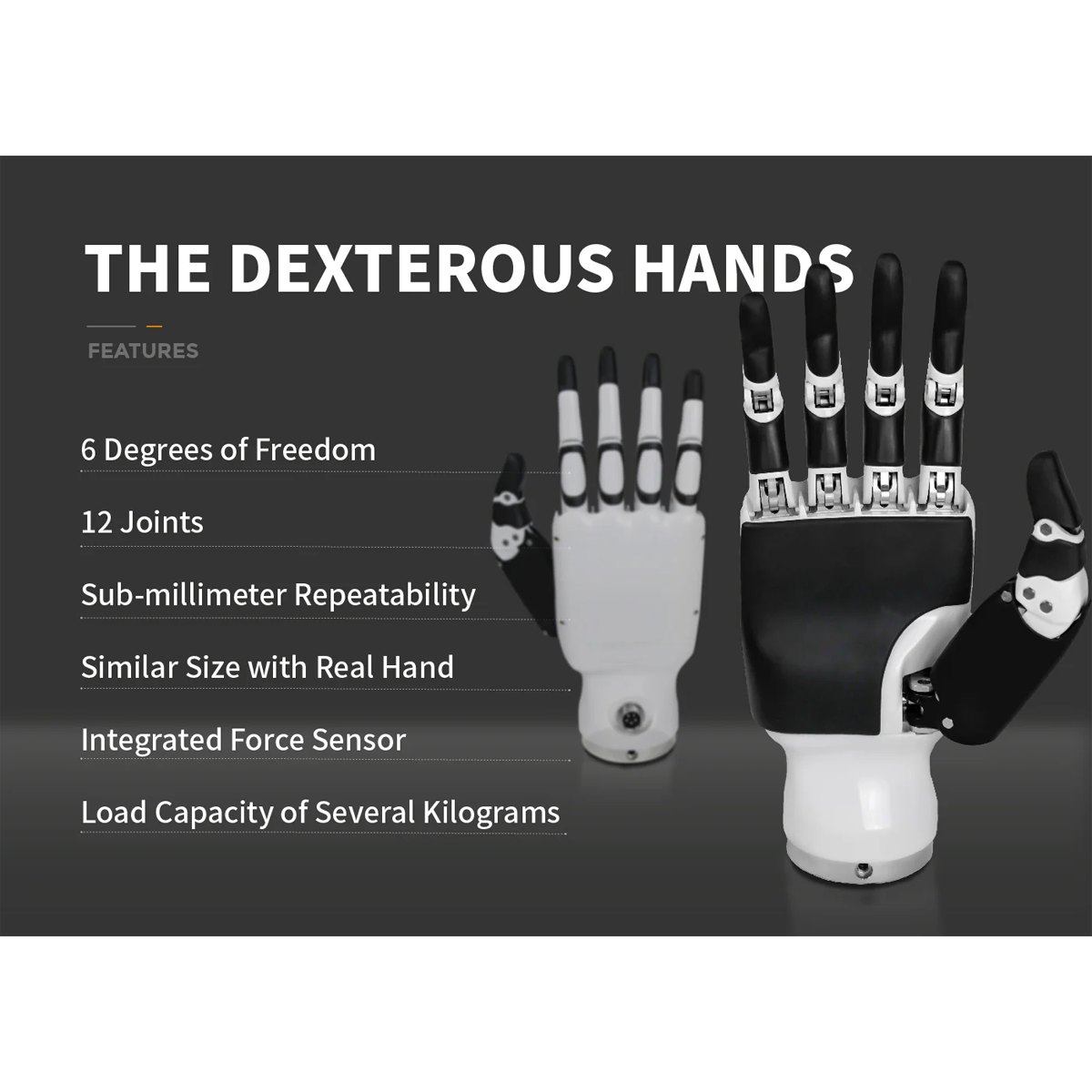
Dexterous Handsは、6つのマイクロリニアサーボアクチュエータと6つの圧力センサーを内蔵した革新的なリニアドライブ設計を特徴としています。
片手には6つの自由度と12個のモータージョイントがあります。
ハイブリッド力と位置制御アルゴリズムと組み合わせることで、人間の手をシミュレートし、正確な把持操作を実現できます。
ROSをサポートし、ROSプラグインが利用可能です。
Dexterous Hands RH56BFXシリーズは、RH56DFXシリーズよりも速度が速く、握る力がわずかに弱いため、ピアノ演奏、モーラ、ジェスチャーダンスなどの機能的な状況に適しています。
機械式手首が必要な場合は、「手首付き」パッケージを選択してください。

| 型番 | 備考 |
|---|---|
| ELRIR-BFXH00R | ロボットハンド「RH56BFX」の左手 |
| ELRIR-BFXH01R | ロボットハンド「RH56BFX」の右手 |
RH56DFX(L) / (R)
Dexterous Handsは、6つのマイクロリニアサーボアクチュエータと6つの圧力センサーを内蔵した革新的なリニアドライブ設計を特徴としています。片手には6つの自由度と12個のモータージョイントがあります。ハイブリッド力と位置制御アルゴリズムと組み合わせることで、人間の手をシミュレートし、正確な把持操作を実現できます。ROSをサポートし、ROSプラグインが利用可能です。
Dexterous Hands RH56DFXシリーズは、大きな把持力と適度なスピードを特徴とし、ロボットや義肢の把持作業に適しています。
機械式手首が必要な場合は、「手首付き」パッケージを選択してください。

| 型番 | 備考 |
|---|---|
| ELRIR-DFXH00R | ロボットハンド「RH56DFX」の左手 |
| ELRIR-DFXH01R | ロボットハンド「RH56DFX」の右手 |
RH56E2シリーズ
高精度な触覚制御で、人の手の繊細さを再現
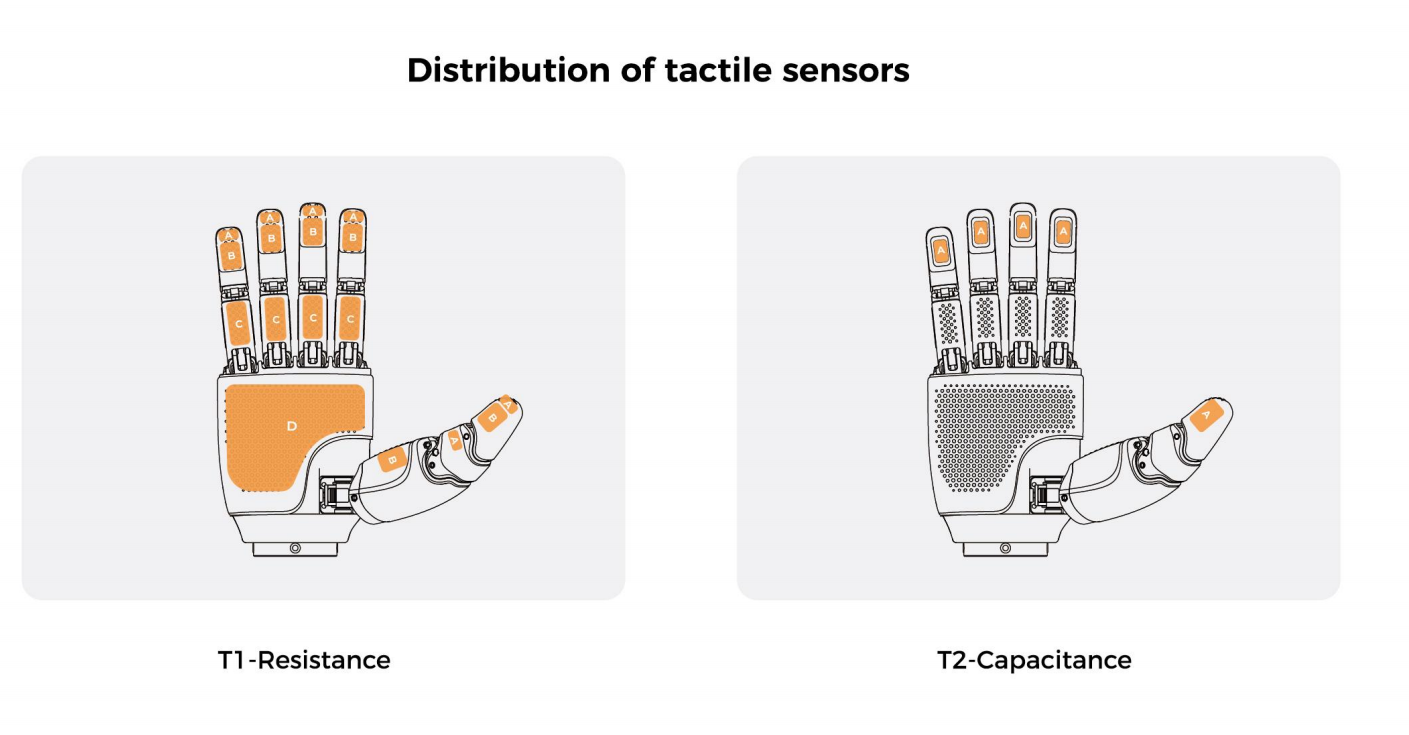
RH56E2には2種類の製品があります。
・コンデンサー式触覚センサー(垂直と水平力の両方向感知対応)搭載バージョン:指先に搭載(全部で5個)
・抵抗型触覚センサー(垂直力感知のみ)搭載バージョン:指と手のひらを合わせて17個搭載
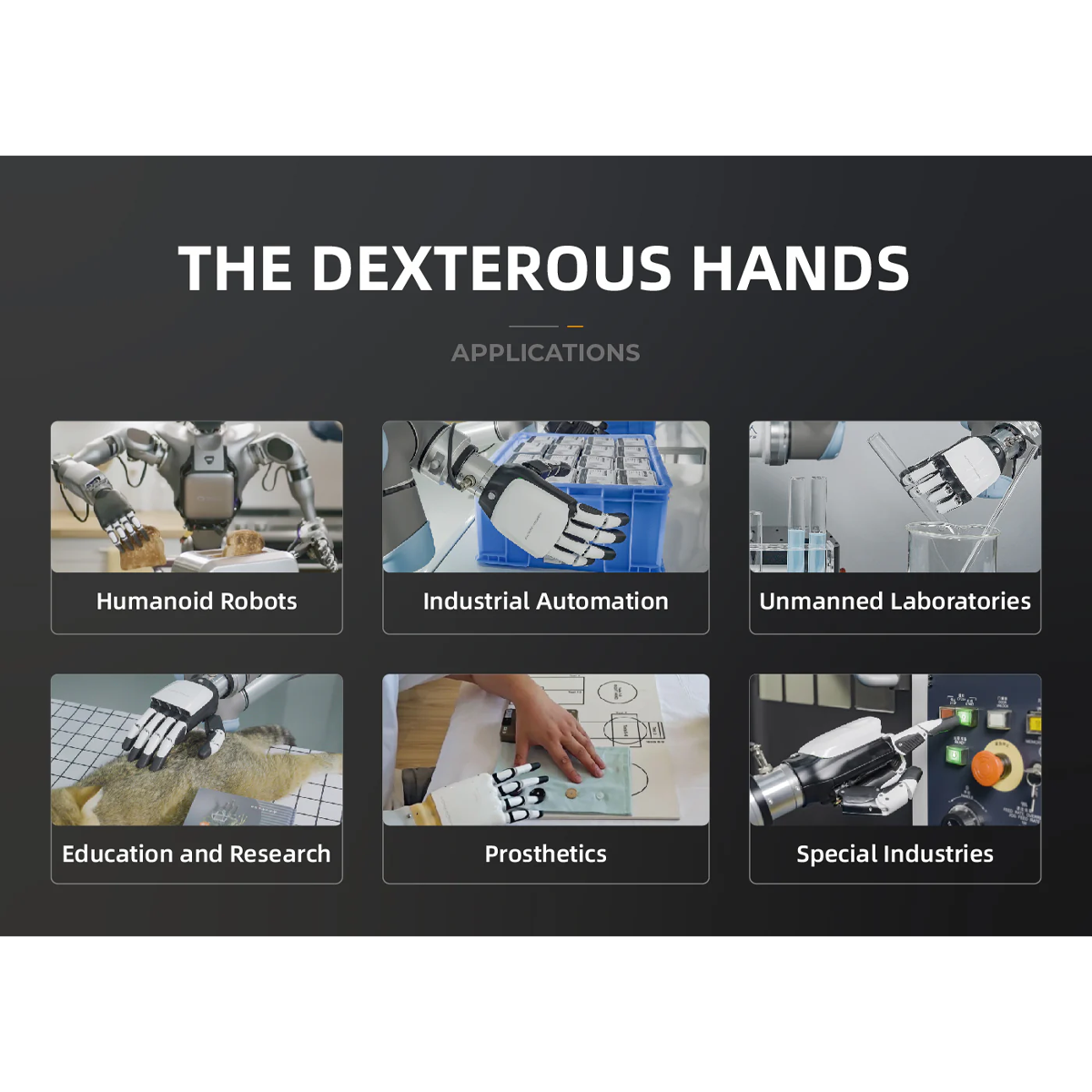
親指の最大受動荷重能力20kgと100万回以上の耐久性を備え、AIロボット、検査工程、介護支援、リモート作業など多様な現場で、人のような柔軟かつ精密な作業を実現します。

| 型番 | 備考 |
|---|---|
| ELRIR-0E2H00R | ロボットハンド「RH56E2」の左手(触覚機能搭載バージョン) |
| ELRIR-0E2H01R | ロボットハンド「RH56E2」の右手(触覚機能搭載バージョン) |
AMW-RH-12-2(オプション)
| 型番 | 備考 |
|---|---|
| ELRIR-AMWO00R | 二重自由度の手首、ロボットハンド「RH56BFX」と「RH56DFX」対応 |